 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymskill: Symbol and Skill Co-Invention for Data-Efficient and Real-Time Long-Horizon Manipulation
Oct 02, 2025Multi-step manipulation in dynamic environments remains challenging. Two major families of methods fail in distinct ways: (i) imitation learning (IL) is reactive but lacks compositional generalization, as monolithic policies do not decide which skill to reuse when scenes change; (ii) classical task-and-motion planning (TAMP) offers compositionality but has prohibitive planning latency, preventing real-time failure recovery. We introduce SymSkill, a unified learning framework that combines the benefits of IL and TAMP, allowing compositional generalization and failure recovery in real-time. Offline, SymSkill jointly learns predicates, operators, and skills directly from unlabeled and unsegmented demonstrations. At execution time, upon specifying a conjunction of one or more learned predicates, SymSkill uses a symbolic planner to compose and reorder learned skills to achieve the symbolic goals, while performing recovery at both the motion and symbolic levels in real time. Coupled with a compliant controller, SymSkill enables safe and uninterrupted execution under human and environmental disturbances. In RoboCasa simulation, SymSkill can execute 12 single-step tasks with 85% success rate. Without additional data, it composes these skills into multi-step plans requiring up to 6 skill recompositions, recovering robustly from execution failures. On a real Franka robot, we demonstrate SymSkill, learning from 5 minutes of unsegmented and unlabeled play data, is capable of performing multiple tasks simply by goal specifications. The source code and additional analysis can be found on https://sites.google.com/view/symskill.
Elastic Motion Policy: An Adaptive Dynamical System for Robust and Efficient One-Shot Imitation Learning
Mar 11, 2025Behavior cloning (BC) has become a staple imitation learning paradigm in robotics due to its ease of teaching robots complex skills directly from expert demonstrations. However, BC suffers from an inherent generalization issue. To solve this, the status quo solution is to gather more data. Yet, regardless of how much training data is available, out-of-distribution performance is still sub-par, lacks any formal guarantee of convergence and success, and is incapable of allowing and recovering from physical interactions with humans. These are critical flaws when robots are deployed in ever-changing human-centric environments. Thus, we propose Elastic Motion Policy (EMP), a one-shot imitation learning framework that allows robots to adjust their behavior based on the scene change while respecting the task specification. Trained from a single demonstration, EMP follows the dynamical systems paradigm where motion planning and control are governed by first-order differential equations with convergence guarantees. We leverage Laplacian editing in full end-effector space, $\mathbb{R}^3\times SO(3)$, and online convex learning of Lyapunov functions, to adapt EMP online to new contexts, avoiding the need to collect new demonstrations. We extensively validate our framework in real robot experiments, demonstrating its robust and efficient performance in dynamic environments, with obstacle avoidance and multi-step task capabilities. Project Website: https://elastic-motion-policy.github.io/EMP/
SE(3) Linear Parameter Varying Dynamical Systems for Globally Asymptotically Stable End-Effector Control
Mar 25, 2024



Linear Parameter Varying Dynamical Systems (LPV-DS) encode trajectories into an autonomous first-order DS that enables reactive responses to perturbations, while ensuring globally asymptotic stability at the target. However, the current LPV-DS framework is established on Euclidean data only and has not been applicable to broader robotic applications requiring pose control. In this paper we present an extension to the current LPV-DS framework, named Quaternion-DS, which efficiently learns a DS-based motion policy for orientation. Leveraging techniques from differential geometry and Riemannian statistics, our approach properly handles the non-Euclidean orientation data in quaternion space, enabling the integration with positional control, namely SE(3) LPV-DS, so that the synergistic behaviour within the full SE(3) pose is preserved. Through simulation and real robot experiments, we validate our method, demonstrating its ability to efficiently and accurately reproduce the original SE(3) trajectory while exhibiting strong robustness to perturbations in task space.
DAMM: Directionality-Aware Mixture Model Parallel Sampling for Efficient Dynamical System Learning
Sep 05, 2023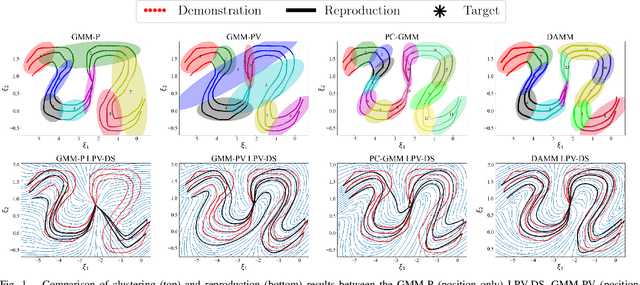
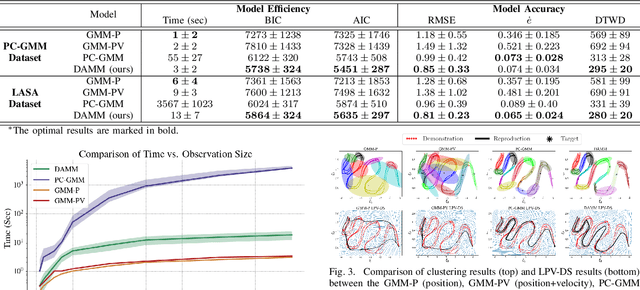
The Linear Parameter Varying Dynamical System (LPV-DS) is a promising framework for learning stable time-invariant motion policies in robot control. By employing statistical modeling and semi-definite optimization, LPV-DS encodes complex motions via non-linear DS, ensuring the robustness and stability of the system. However, the current LPV-DS scheme faces challenges in accurately interpreting trajectory data while maintaining model efficiency and computational efficiency. To address these limitations, we propose the Directionality-aware Mixture Model (DAMM), a new statistical model that leverages Riemannian metric on $d$-dimensional sphere $\mathbb{S}^d$, and efficiently incorporates non-Euclidean directional information with position. Additionally, we introduce a hybrid Markov chain Monte Carlo method that combines the Gibbs Sampling and the Split/Merge Proposal, facilitating parallel computation and enabling faster inference for near real-time learning performance. Through extensive empirical validation, we demonstrate that the improved LPV-DS framework with DAMM is capable of producing physically-meaningful representations of the trajectory data and improved performance of the generated DS while showcasing significantly enhanced learning speed compared to its previous iterations.