 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Corrector-aided Look-ahead Distance-based Guidance for Reference Path Following with an Efficient Midcourse Guidance Strategy
Apr 08, 2025

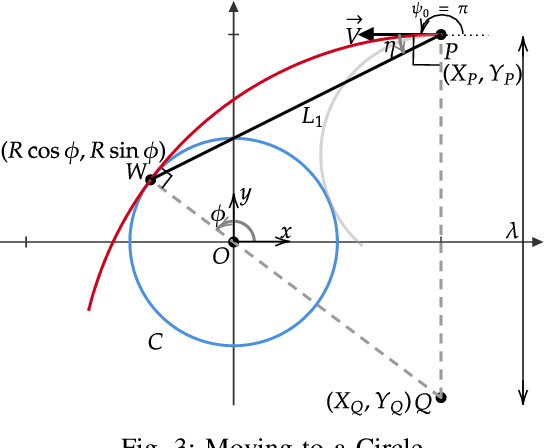
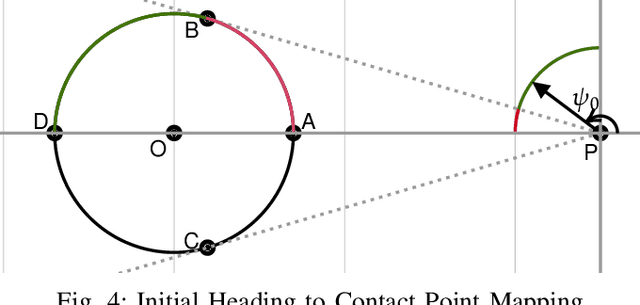
Efficient path-following is crucial in most of the applications of autonomous vehicles (UxV). Among various guidance strategies presented in literature, look-ahead distance ($L_1$)-based guidance method has received significant attention due to its ease in implementation and ability to maintain a low cross-track error while following simpler reference paths and generate bounded lateral acceleration commands. However, the constant value of $L_1$ becomes problematic when the UxV is far away from the reference path and also produce higher cross-track error while following complex reference paths having high variation in radius of curvature. To address these challenges, the notion of look-ahead distance is leveraged in a novel way to develop a two-phase guidance strategy. Initially, when the UxV is far from the reference path, an optimized $L_1$ selection strategy is developed to guide the UxV toward the reference path in order to maintain minimal lateral acceleration command. Once the vehicle reaches a close vicinity of the reference path, a novel notion of corrector point is incorporated in the constant $L_1$-based guidance scheme to generate the lateral acceleration command that effectively reduces the root mean square of the cross-track error thereafter. Simulation results demonstrate that this proposed corrector point and look-ahead point pair-based guidance strategy along with the developed midcourse guidance scheme outperforms the conventional constant $L_1$ guidance scheme both in terms of feasibility and measures of effectiveness like cross-track error and lateral acceleration requirements.
Switched Vector Field-based Guidance for General Reference Path Following in Planar Environment
May 10, 2024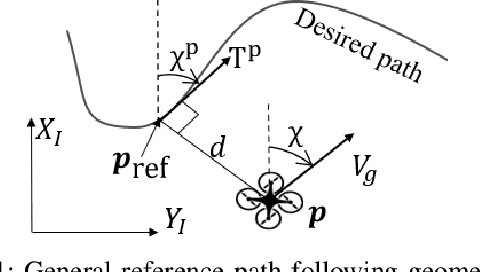
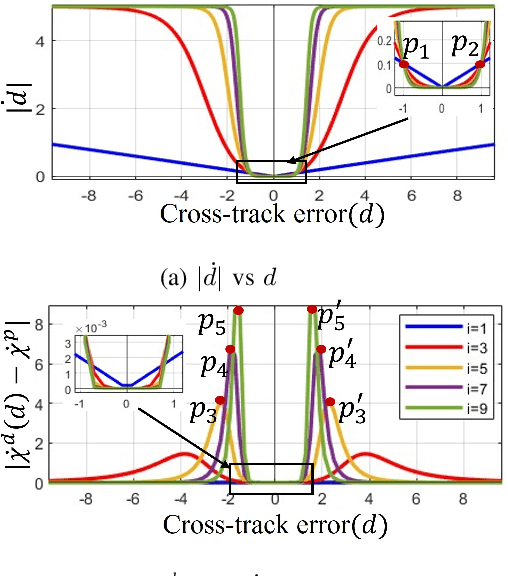
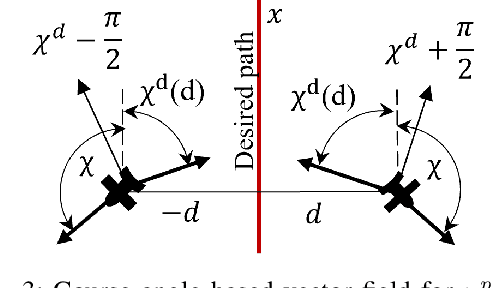
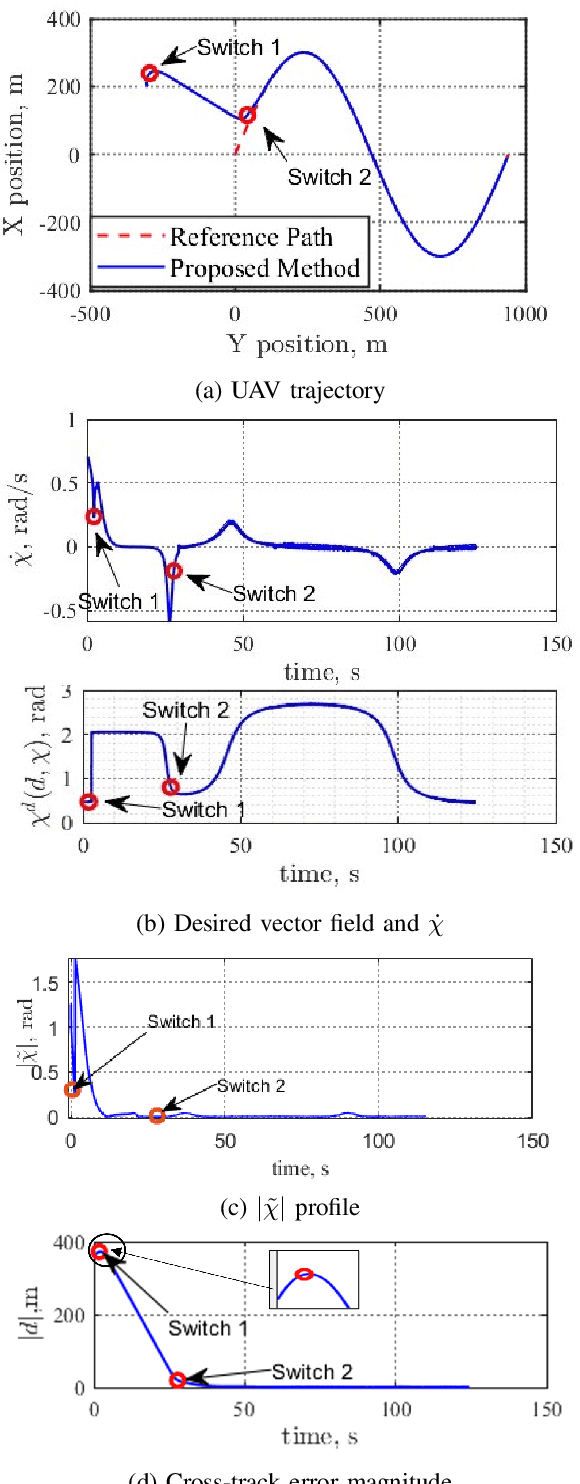
Reference path following is a key component in the functioning of almost all engineered autonomous agents. Among several path following guidance methods in existing literature, vector-field-based guidance approach has got wide attention because of its simplicity and guarantee of stability under a broad class of scenarios. However, the usage of same cross-track-error-dependent structure of desired vector field in most of the existing literature irrespective of instantaneous cross-track error and course angle of unmanned vehicle makes it quite restrictive in attaining faster convergence and also leads to infeasibly high turn rate command for many scenarios. To this end, this paper presents a novel switched vector field-based guidance for following a general reference path, in which the structure of the desired vector field depends on instantaneous cross-track-error and vehicle's course angle. While the developed method ensures faster convergence, it also ensures that the guidance command always stays within a realistic threshold satisfying its curvature constraint, thus making it more real-life implementable for autonomous vehicles with kino-dynamic constraints. Theoretical analysis for convergence of the developed guidance scheme is presented. Possibilities of undesirable chattering at phase transitions are also eliminated. Numerical simulation studies are presented to validate the satisfactory performance of the developed algorithm.