 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSwitched Vector Field-based Guidance for General Reference Path Following in Planar Environment
Paper and Code
May 10, 2024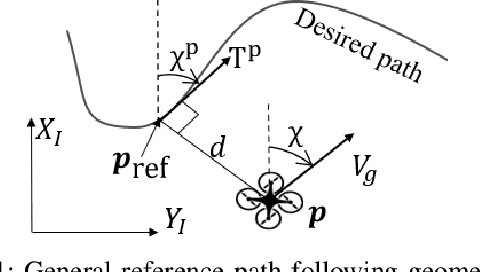
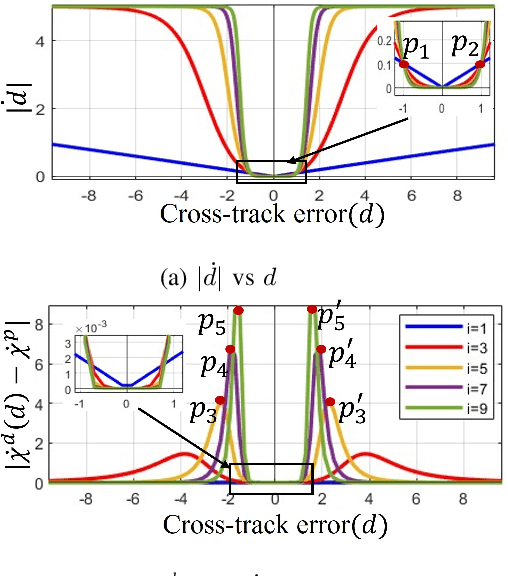
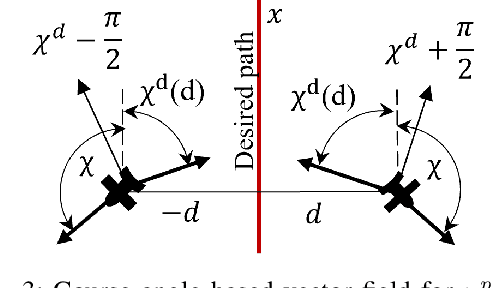
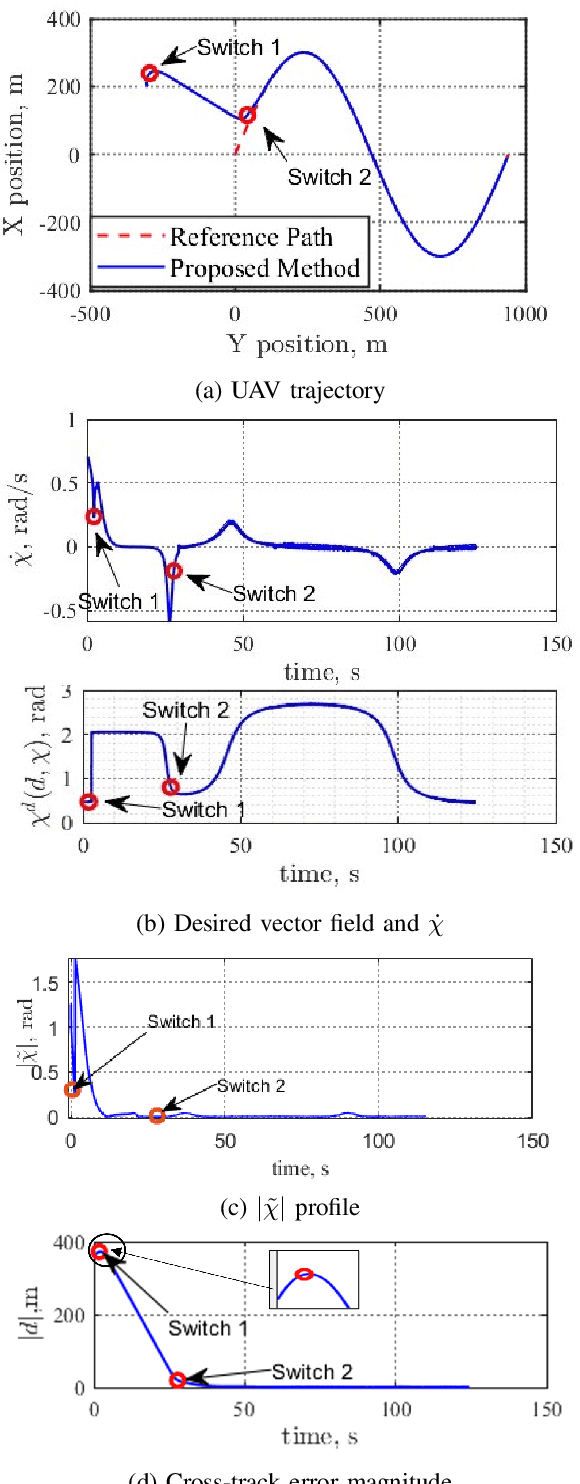
Reference path following is a key component in the functioning of almost all engineered autonomous agents. Among several path following guidance methods in existing literature, vector-field-based guidance approach has got wide attention because of its simplicity and guarantee of stability under a broad class of scenarios. However, the usage of same cross-track-error-dependent structure of desired vector field in most of the existing literature irrespective of instantaneous cross-track error and course angle of unmanned vehicle makes it quite restrictive in attaining faster convergence and also leads to infeasibly high turn rate command for many scenarios. To this end, this paper presents a novel switched vector field-based guidance for following a general reference path, in which the structure of the desired vector field depends on instantaneous cross-track-error and vehicle's course angle. While the developed method ensures faster convergence, it also ensures that the guidance command always stays within a realistic threshold satisfying its curvature constraint, thus making it more real-life implementable for autonomous vehicles with kino-dynamic constraints. Theoretical analysis for convergence of the developed guidance scheme is presented. Possibilities of undesirable chattering at phase transitions are also eliminated. Numerical simulation studies are presented to validate the satisfactory performance of the developed algorithm.