 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompressive Sampling Using a Pushframe Camera
Apr 27, 2021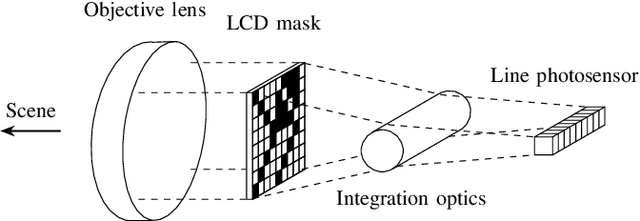

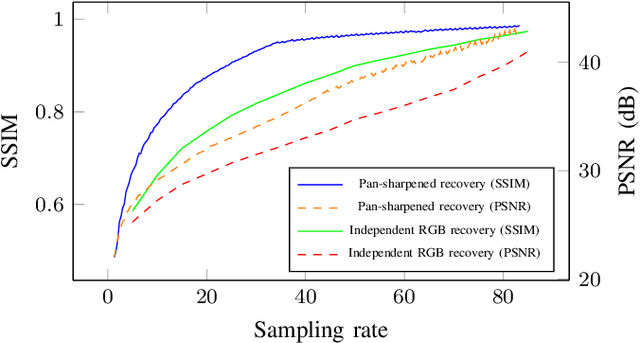
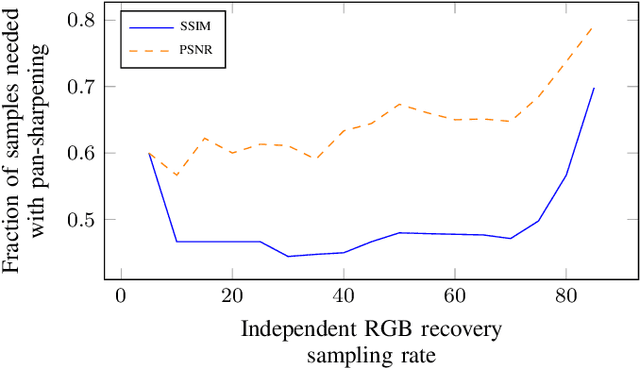
The recently described pushframe imager, a parallelized single pixel camera capturing with a pushbroom-like motion, is intrinsically suited to both remote-sensing and compressive sampling. It optically applies a 2D mask to the imaged scene, before performing light integration along a single spatial axis, but previous work has not made use of the architecture's potential for taking measurements sparsely. In this paper we develop a strongly performing static binarized noiselet compressive sampling mask design, tailored to pushframe hardware, allowing both a single exposure per motion time-step, and retention of 2D correlations in the scene. Results from simulated and real-world captures are presented, with performance shown to be similar to that of immobile -- and hence inappropriate for satellite use -- whole-scene imagers. A particular feature of our sampling approach is that the degree of compression can be varied without altering the pattern, and we demonstrate the utility of this for efficiently storing and transmitting multi-spectral images.
ChESS - Quick and Robust Detection of Chess-board Features
Jan 23, 2013



Localization of chess-board vertices is a common task in computer vision, underpinning many applications, but relatively little work focusses on designing a specific feature detector that is fast, accurate and robust. In this paper the `Chess-board Extraction by Subtraction and Summation' (ChESS) feature detector, designed to exclusively respond to chess-board vertices, is presented. The method proposed is robust against noise, poor lighting and poor contrast, requires no prior knowledge of the extent of the chess-board pattern, is computationally very efficient, and provides a strength measure of detected features. Such a detector has significant application both in the key field of camera calibration, as well as in Structured Light 3D reconstruction. Evidence is presented showing its robustness, accuracy, and efficiency in comparison to other commonly used detectors both under simulation and in experimental 3D reconstruction of flat plate and cylindrical objects