 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeR-WhONet: Recalibrated Wheel Odometry Neural Network for Vehicular Positioning using Transfer Learning
Sep 13, 2022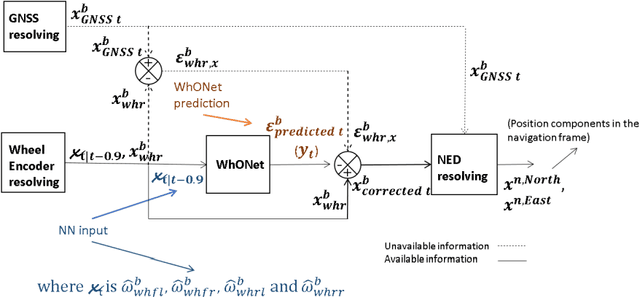
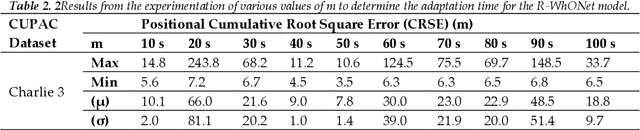
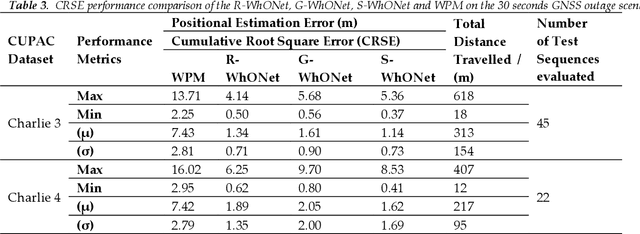
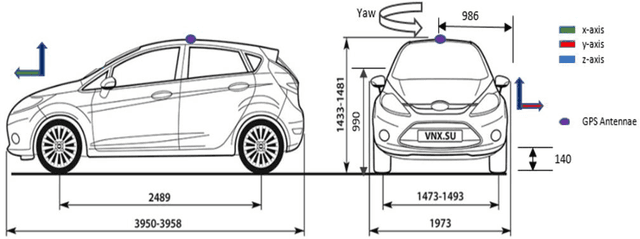
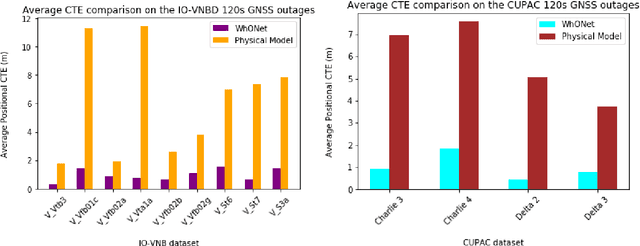
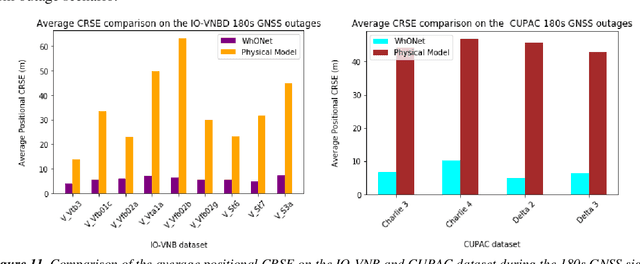
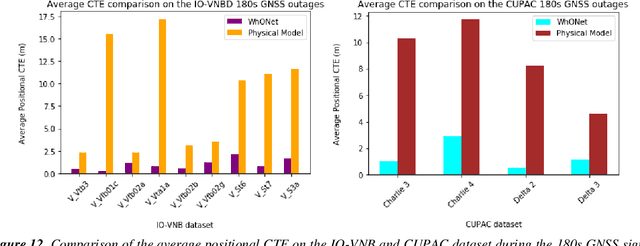
This paper proposes a transfer learning approach to recalibrate our previously developed Wheel Odometry Neural Network (WhONet) for vehicle positioning in environments where Global Navigation Satellite Systems (GNSS) are unavailable. The WhONet has been shown to possess the capability to learn the uncertainties in the wheel speed measurements needed for correction and accurate positioning of vehicles. These uncertainties may be manifested as tyre pressure changes from driving on muddy and uneven terrains or wheel slips. However, a common cause for concern for data-driven approaches, such as the WhONet model, is usually the inability to generalise the models to a new vehicle. In scenarios where machine learning models are trained in a specific domain but deployed in another domain, the model's performance degrades. In real-life scenarios, several factors are influential to this degradation, from changes to the dynamics of the vehicle to new pattern distributions of the sensor's noise, and bias will make the test sensor data vary from training data. Therefore, the challenge is to explore techniques that allow the trained machine learning models to spontaneously adjust to new vehicle domains. As such, we propose the Recalibrated-Wheel Odometry neural Network (R-WhONet), that adapts the WhONet model from its source domain (a vehicle and environment on which the model is initially trained) to the target domain (a new vehicle on which the trained model is to be deployed). Through a performance evaluation on several GNSS outage scenarios - short-term complex driving scenarios, and on longer-term GNSS outage scenarios. We demonstrate that a model trained in the source domain does not generalise well to a new vehicle in the target domain. However, we show that our new proposed framework improves the generalisation of the WhONet model to new vehicles in the target domains by up to 32%.
WhONet: Wheel Odometry Neural Network for Vehicular Localisation in GNSS-Deprived Environments
Apr 06, 2021
In this paper, a deep learning approach is proposed to accurately position wheeled vehicles in Global Navigation Satellite Systems (GNSS) deprived environments. In the absence of GNSS signals, information on the speed of the wheels of a vehicle (or other robots alike), recorded from the wheel encoder, can be used to provide continuous positioning information for the vehicle, through the integration of the vehicle's linear velocity to displacement. However, the displacement estimation from the wheel speed measurements are characterised by uncertainties, which could be manifested as wheel slips or/and changes to the tyre size or pressure, from wet and muddy road drives or tyres wearing out. As such, we exploit recent advances in deep learning to propose the Wheel Odometry neural Network (WhONet) to learn the uncertainties in the wheel speed measurements needed for correction and accurate positioning. The performance of the proposed WhONet is first evaluated on several challenging driving scenarios, such as on roundabouts, sharp cornering, hard-brake and wet roads (drifts). WhONet's performance is then further and extensively evaluated on longer-term GNSS outage scenarios of 30s, 60s, 120s and 180s duration, respectively over a total distance of 493 km. The experimental results obtained show that the proposed method is able to accurately position the vehicle with up to 93% reduction in the positioning error of its original counterpart after any 180s of travel. WhONet's implementation can be found at https://github.com/onyekpeu/WhONet.
Performance Boundary Identification for the Evaluation of Automated Vehicles using Gaussian Process Classification
Jul 11, 2019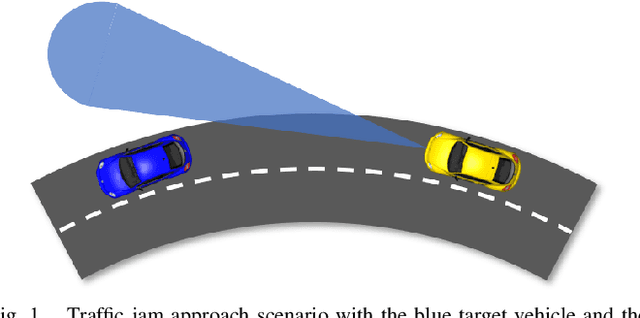
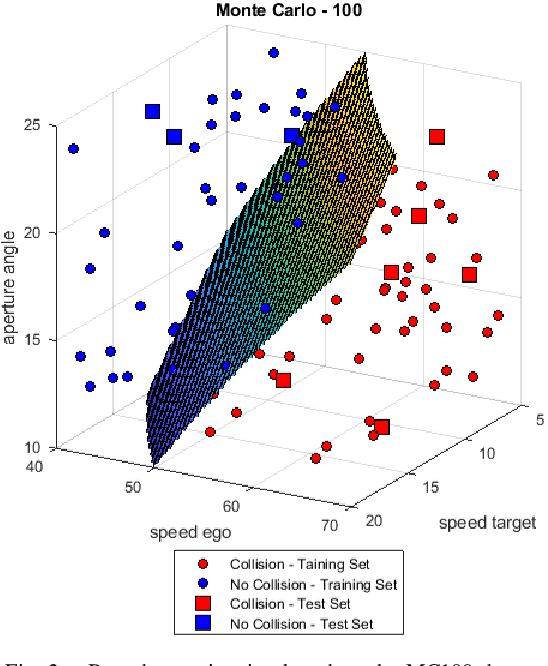
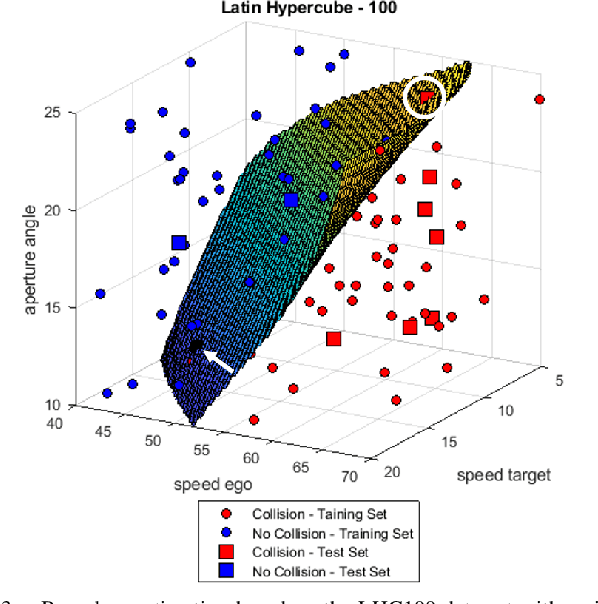
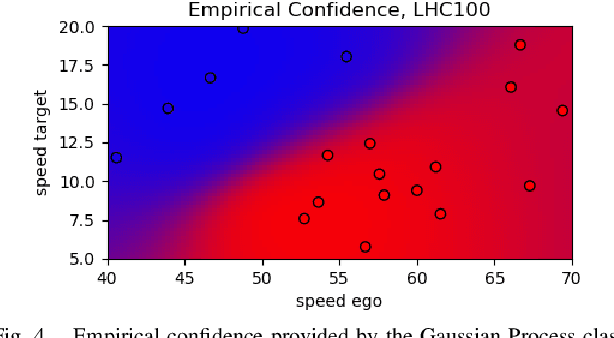
Safety is an essential aspect in the facilitation of automated vehicle deployment. Current testing practices are not enough, and going beyond them leads to infeasible testing requirements, such as needing to drive billions of kilometres on public roads. Automated vehicles are exposed to an indefinite number of scenarios. Handling of the most challenging scenarios should be tested, which leads to the question of how such corner cases can be determined. We propose an approach to identify the performance boundary, where these corner cases are located, using Gaussian Process Classification. We also demonstrate the classification on an exemplary traffic jam approach scenario, showing that it is feasible and would lead to more efficient testing practices.