 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance Boundary Identification for the Evaluation of Automated Vehicles using Gaussian Process Classification
Jul 11, 2019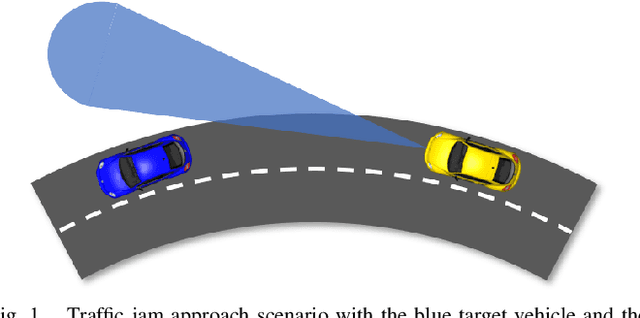
Safety is an essential aspect in the facilitation of automated vehicle deployment. Current testing practices are not enough, and going beyond them leads to infeasible testing requirements, such as needing to drive billions of kilometres on public roads. Automated vehicles are exposed to an indefinite number of scenarios. Handling of the most challenging scenarios should be tested, which leads to the question of how such corner cases can be determined. We propose an approach to identify the performance boundary, where these corner cases are located, using Gaussian Process Classification. We also demonstrate the classification on an exemplary traffic jam approach scenario, showing that it is feasible and would lead to more efficient testing practices.