Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAligning an optical interferometer with beam divergence control and continuous action space
Jul 09, 2021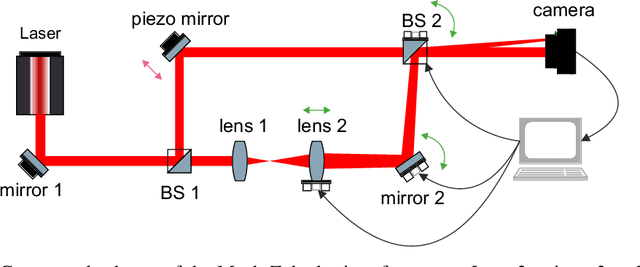
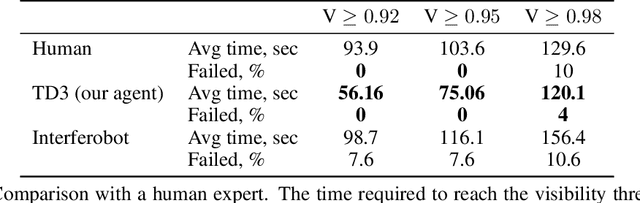
Reinforcement learning is finding its way to real-world problem application, transferring from simulated environments to physical setups. In this work, we implement vision-based alignment of an optical Mach-Zehnder interferometer with a confocal telescope in one arm, which controls the diameter and divergence of the corresponding beam. We use a continuous action space; exponential scaling enables us to handle actions within a range of over two orders of magnitude. Our agent trains only in a simulated environment with domain randomizations. In an experimental evaluation, the agent significantly outperforms an existing solution and a human expert.
* 12 pages, 5 figures
Via