 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHands-On Robotics: Enabling Communication Through Direct Gesture Control
Jan 17, 2024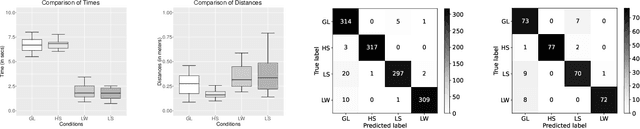
Effective Human-Robot Interaction (HRI) is fundamental to seamlessly integrating robotic systems into our daily lives. However, current communication modes require additional technological interfaces, which can be cumbersome and indirect. This paper presents a novel approach, using direct motion-based communication by moving a robot's end effector. Our strategy enables users to communicate with a robot by using four distinct gestures -- two handshakes ('formal' and 'informal') and two letters ('W' and 'S'). As a proof-of-concept, we conducted a user study with 16 participants, capturing subjective experience ratings and objective data for training machine learning classifiers. Our findings show that the four different gestures performed by moving the robot's end effector can be distinguished with close to 100% accuracy. Our research offers implications for the design of future HRI interfaces, suggesting that motion-based interaction can empower human operators to communicate directly with robots, removing the necessity for additional hardware.
How to Communicate Robot Motion Intent: A Scoping Review
Mar 01, 2023Robots are becoming increasingly omnipresent in our daily lives, supporting us and carrying out autonomous tasks. In Human-Robot Interaction, human actors benefit from understanding the robot's motion intent to avoid task failures and foster collaboration. Finding effective ways to communicate this intent to users has recently received increased research interest. However, no common language has been established to systematize robot motion intent. This work presents a scoping review aimed at unifying existing knowledge. Based on our analysis, we present an intent communication model that depicts the relationship between robot and human through different intent dimensions (intent type, intent information, intent location). We discuss these different intent dimensions and their interrelationships with different kinds of robots and human roles. Throughout our analysis, we classify the existing research literature along our intent communication model, allowing us to identify key patterns and possible directions for future research.
Implicit Cooperation: Emotion Detection for Validation and Adaptation of Automated Vehicles' Driving Behavior
Mar 29, 2020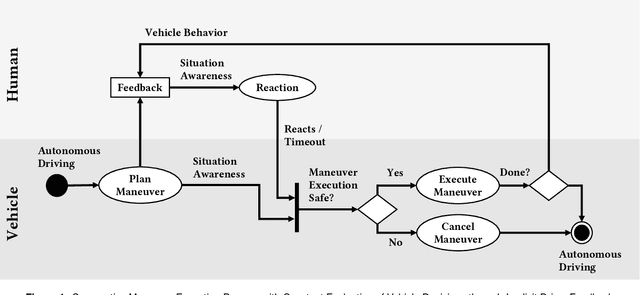
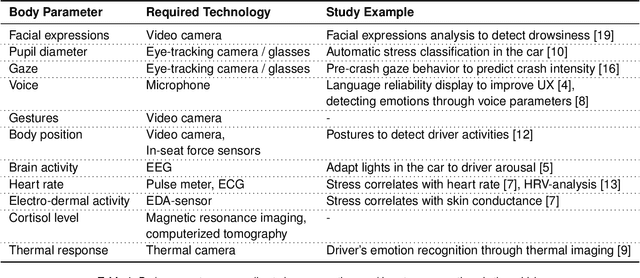
Human emotion detection in automated vehicles helps to improve comfort and safety. Research in the automotive domain focuses a lot on sensing drivers' drowsiness and aggression. We present a new form of implicit driver-vehicle cooperation, where emotion detection is integrated into an automated vehicle's decision-making process. Constant evaluation of the driver's reaction to vehicle behavior allows us to revise decisions and helps to increase the safety of future automated vehicles.