 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRIFT: Deep Restoration, ISP Fusion, and Tone-mapping
Apr 03, 2026Smartphone cameras have gained immense popularity with the adoption of high-resolution and high-dynamic range imaging. As a result, high-performance camera Image Signal Processors (ISPs) are crucial in generating high-quality images for the end user while keeping computational costs low. In this paper, we propose DRIFT (Deep Restoration, ISP Fusion, and Tone-mapping): an efficient AI mobile camera pipeline that generates high quality RGB images from hand-held raw captures. The first stage of DRIFT is a Multi-Frame Processing (MFP) network that is trained using a adversarial perceptual loss to perform multi-frame alignment, denoising, demosaicing, and super-resolution. Then, the output of DRIFT-MFP is processed by a novel deep-learning based tone-mapping (DRIFT-TM) solution that allows for tone tunability, ensures tone-consistency with a reference pipeline, and can be run efficiently for high-resolution images on a mobile device. We show qualitative and quantitative comparisons against state-of-the-art MFP and tone-mapping methods to demonstrate the effectiveness of our approach.
GenMFSR: Generative Multi-Frame Image Restoration and Super-Resolution
Mar 19, 2026Camera pipelines receive raw Bayer-format frames that need to be denoised, demosaiced, and often super-resolved. Multiple frames are captured to utilize natural hand tremors and enhance resolution. Multi-frame super-resolution is therefore a fundamental problem in camera pipelines. Existing adversarial methods are constrained by the quality of ground truth. We propose GenMFSR, the first Generative Multi-Frame Raw-to-RGB Super Resolution pipeline, that incorporates image priors from foundation models to obtain sub-pixel information for camera ISP applications. GenMFSR can align multiple raw frames, unlike existing single-frame super-resolution methods, and we propose a loss term that restricts generation to high-frequency regions in the raw domain, thus preventing low-frequency artifacts.
PathFinder: Attention-Driven Dynamic Non-Line-of-Sight Tracking with a Mobile Robot
Apr 07, 2024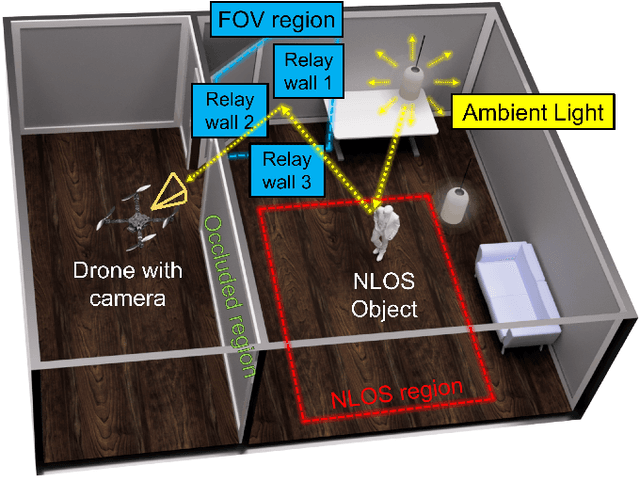
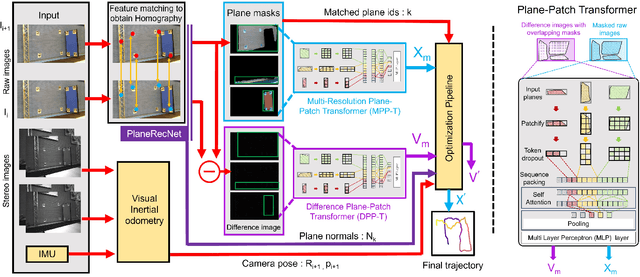
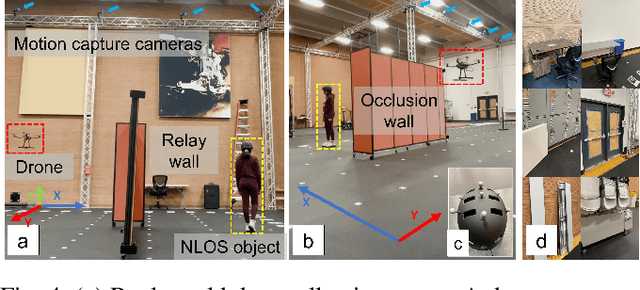
The study of non-line-of-sight (NLOS) imaging is growing due to its many potential applications, including rescue operations and pedestrian detection by self-driving cars. However, implementing NLOS imaging on a moving camera remains an open area of research. Existing NLOS imaging methods rely on time-resolved detectors and laser configurations that require precise optical alignment, making it difficult to deploy them in dynamic environments. This work proposes a data-driven approach to NLOS imaging, PathFinder, that can be used with a standard RGB camera mounted on a small, power-constrained mobile robot, such as an aerial drone. Our experimental pipeline is designed to accurately estimate the 2D trajectory of a person who moves in a Manhattan-world environment while remaining hidden from the camera's field-of-view. We introduce a novel approach to process a sequence of dynamic successive frames in a line-of-sight (LOS) video using an attention-based neural network that performs inference in real-time. The method also includes a preprocessing selection metric that analyzes images from a moving camera which contain multiple vertical planar surfaces, such as walls and building facades, and extracts planes that return maximum NLOS information. We validate the approach on in-the-wild scenes using a drone for video capture, thus demonstrating low-cost NLOS imaging in dynamic capture environments.
Adaptive Lighting for Data-Driven Non-Line-of-Sight 3D Localization and Object Identification
May 28, 2019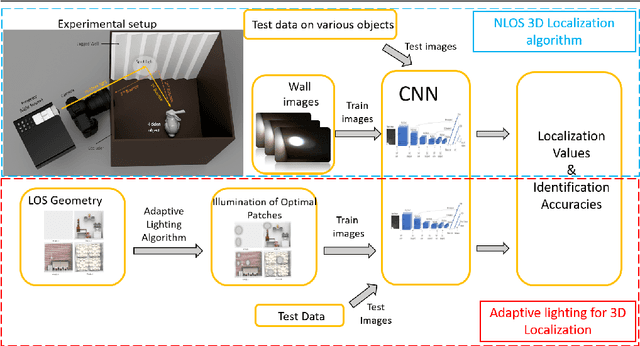
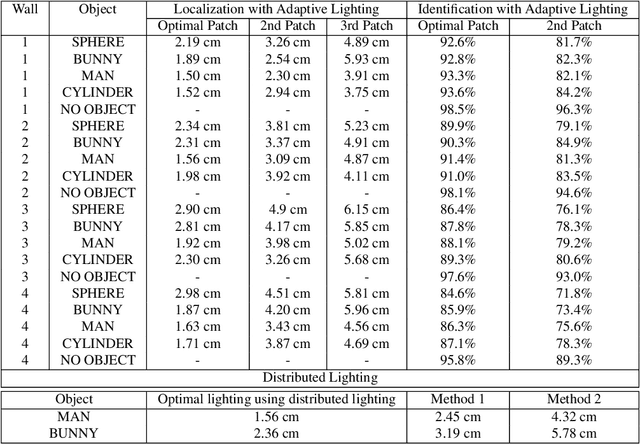

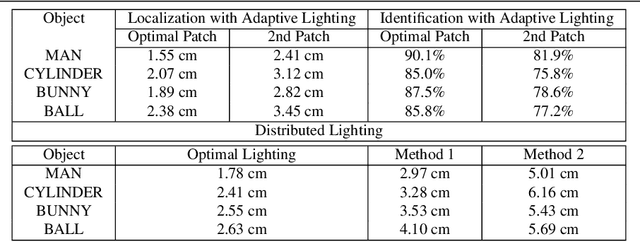
Non-line-of-sight (NLOS) imaging of objects not visible to either the camera or illumination source is a challenging task with vital applications including surveillance and robotics. Recent NLOS reconstruction advances have been achieved using time-resolved measurements which requires expensive and specialized detectors and laser sources. In contrast, we propose a data-driven approach for NLOS 3D localization requiring only a conventional camera and projector. We achieve an average identification of 79% object identification for three classes of objects, and localization of the NLOS object's centroid for a mean-squared error (MSE) of 2.89cm in the occluded region for real data taken from a hardware prototype. To generalize to line-of-sight (LOS) scenes with non-planar surfaces, we introduce an adaptive lighting algorithm. This algorithm, based on radiosity, identifies and illuminates scene patches in the LOS which most contribute to the NLOS light paths, and can factor in system power constraints. We further improve our average NLOS object identification to 87.8% accuracy and localization to 1.94cm MSE on a complex LOS scene using adaptive lighting for real data, demonstrating the advantage of combining the physics of light transport with active illumination for data-driven NLOS imaging.