 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Lighting for Data-Driven Non-Line-of-Sight 3D Localization and Object Identification
Paper and Code
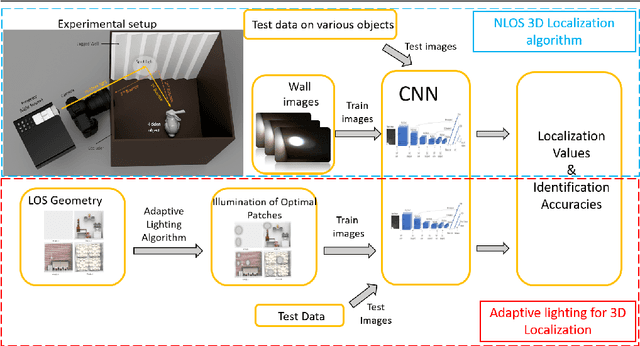
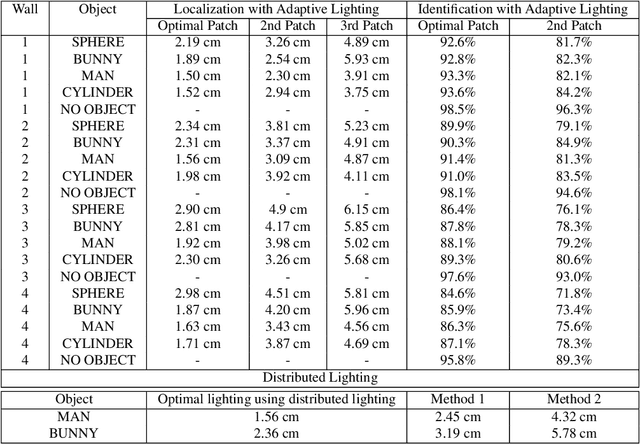

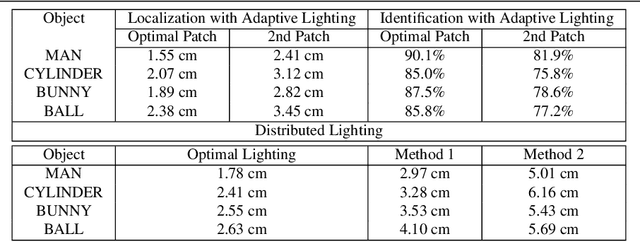
Non-line-of-sight (NLOS) imaging of objects not visible to either the camera or illumination source is a challenging task with vital applications including surveillance and robotics. Recent NLOS reconstruction advances have been achieved using time-resolved measurements which requires expensive and specialized detectors and laser sources. In contrast, we propose a data-driven approach for NLOS 3D localization requiring only a conventional camera and projector. We achieve an average identification of 79% object identification for three classes of objects, and localization of the NLOS object's centroid for a mean-squared error (MSE) of 2.89cm in the occluded region for real data taken from a hardware prototype. To generalize to line-of-sight (LOS) scenes with non-planar surfaces, we introduce an adaptive lighting algorithm. This algorithm, based on radiosity, identifies and illuminates scene patches in the LOS which most contribute to the NLOS light paths, and can factor in system power constraints. We further improve our average NLOS object identification to 87.8% accuracy and localization to 1.94cm MSE on a complex LOS scene using adaptive lighting for real data, demonstrating the advantage of combining the physics of light transport with active illumination for data-driven NLOS imaging.