 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifferential Transformer-driven 6G Physical Layer for Collaborative Perception Enhancement
Jun 25, 2025The emergence of 6G wireless networks promises to revolutionize vehicular communications by enabling ultra-reliable, low-latency, and high-capacity data exchange. In this context, collaborative perception techniques, where multiple vehicles or infrastructure nodes cooperate to jointly receive and decode transmitted signals, aim to enhance reliability and spectral efficiency for Connected Autonomous Vehicle (CAV) applications. In this paper, we propose an end-to-end wireless neural receiver based on a Differential Transformer architecture, tailored for 6G V2X communication with a specific focus on enabling collaborative perception among connected autonomous vehicles. Our model integrates key components of the 6G physical layer, designed to boost performance in dynamic and challenging autonomous driving environments. We validate the proposed system across a range of scenarios, including 3GPP-defined Urban Macro (UMa) channel. To assess the model's real-world applicability, we evaluate its robustness within a V2X framework. In a collaborative perception scenario, our system processes heterogeneous LiDAR and camera data from four connected vehicles in dynamic cooperative vehicular networks. The results show significant improvements over state-of-the-art methods, achieving an average precision of 0.84, highlighting the potential of our proposed approach to enable robust, intelligent, and adaptive wireless cooperation for next-generation connected autonomous vehicles.
Deep Multimodal Learning for Real-Time DDoS Attacks Detection in Internet of Vehicles
Jan 25, 2025



The progress and integration of intelligent transport systems (ITS) have therefore been central to creating safer and more efficient transport networks. The Internet of Vehicles (IoV) has the potential to improve road safety and provide comfort to travelers. However, this technology is exposed to a variety of security vulnerabilities that malicious actors could exploit. One of the most serious threats to IoV is the Distributed Denial of Service (DDoS) attack, which could be used to disrupt traffic flow, disable communication between vehicles, or even cause accidents. In this paper, we propose a novel Deep Multimodal Learning (DML) approach for detecting DDoS attacks in IoV, addressing a critical aspect of cybersecurity in intelligent transport systems. Our proposed DML model integrates Long Short-Term Memory (LSTM) and Gated Recurrent Unit (GRU), enhanced by Attention and Gating mechanisms, and Multi-Layer Perceptron (MLP) with a multimodal intermediate fusion architecture. This innovative method effectively identifies and mitigates DDoS attacks in real-time by utilizing the Framework for Misbehavior Detection (F2MD) to generate a synthetic dataset, thereby overcoming the limitations of the existing Vehicular Reference Misbehavior (VeReMi) extension dataset. The proposed approach is evaluated in real-time across different simulated real-world scenario with 10\%, $30\%$, and $50\%$ attacker densities. The proposed DML model achieves an average accuracy of 96.63\%, outperforming the classical Machine Learning (ML) approaches and state-of-the-art methods which demonstrate significant efficacy and reliability in protecting vehicular networks from malicious cyber-attacks.
TransRx-6G-V2X : Transformer Encoder-Based Deep Neural Receiver For Next Generation of Cellular Vehicular Communications
Aug 02, 2024

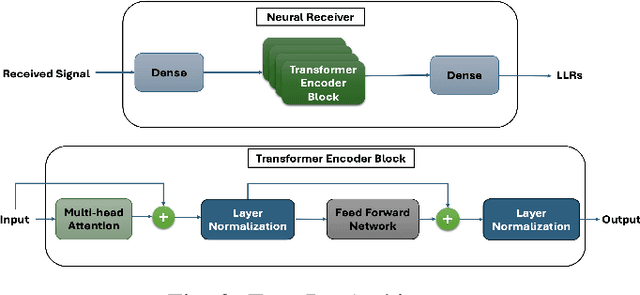
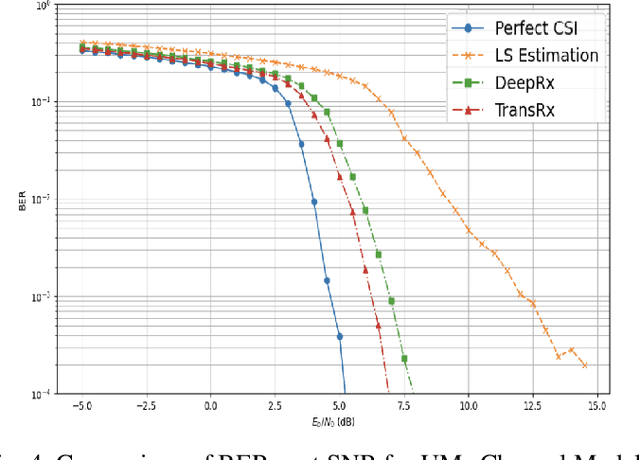
End-to-end wireless communication is new concept expected to be widely used in the physical layer of future wireless communication systems (6G). It involves the substitution of transmitter and receiver block components with a deep neural network (DNN), aiming to enhance the efficiency of data transmission. This will ensure the transition of autonomous vehicles (AVs) from self-autonomy to full collaborative autonomy, that requires vehicular connectivity with high data throughput and minimal latency. In this article, we propose a novel neural network receiver based on transformer architecture, named TransRx, designed for vehicle-to-network (V2N) communications. The TransRx system replaces conventional receiver block components in traditional communication setups. We evaluated our proposed system across various scenarios using different parameter sets and velocities ranging from 0 to 120 km/h over Urban Macro-cell (UMa) channels as defined by 3GPP. The results demonstrate that TransRx outperforms the state-of-the-art systems, achieving a 3.5dB improvement in convergence to low Bit Error Rate (BER) compared to convolutional neural network (CNN)-based neural receivers, and an 8dB improvement compared to traditional baseline receiver configurations. Furthermore, our proposed system exhibits robust generalization capabilities, making it suitable for deployment in large-scale environments.