 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransRx-6G-V2X : Transformer Encoder-Based Deep Neural Receiver For Next Generation of Cellular Vehicular Communications
Paper and Code
Aug 02, 2024

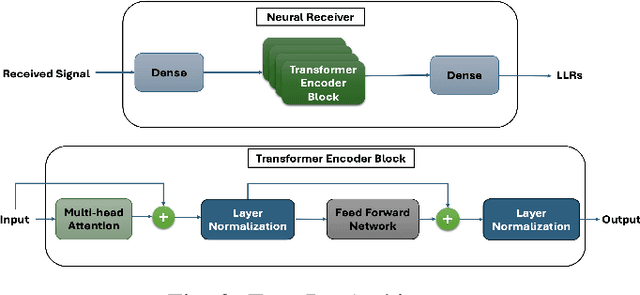
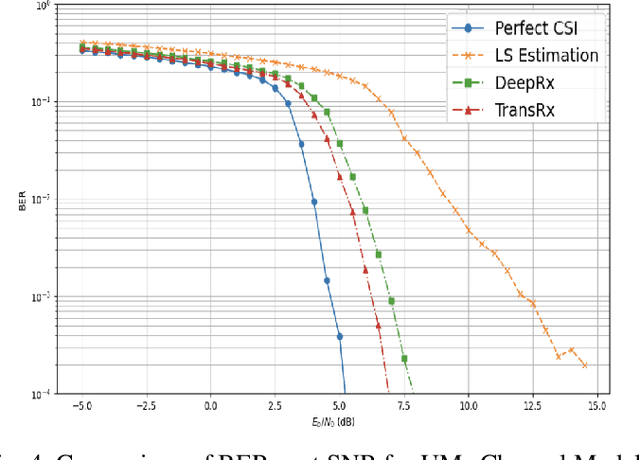
End-to-end wireless communication is new concept expected to be widely used in the physical layer of future wireless communication systems (6G). It involves the substitution of transmitter and receiver block components with a deep neural network (DNN), aiming to enhance the efficiency of data transmission. This will ensure the transition of autonomous vehicles (AVs) from self-autonomy to full collaborative autonomy, that requires vehicular connectivity with high data throughput and minimal latency. In this article, we propose a novel neural network receiver based on transformer architecture, named TransRx, designed for vehicle-to-network (V2N) communications. The TransRx system replaces conventional receiver block components in traditional communication setups. We evaluated our proposed system across various scenarios using different parameter sets and velocities ranging from 0 to 120 km/h over Urban Macro-cell (UMa) channels as defined by 3GPP. The results demonstrate that TransRx outperforms the state-of-the-art systems, achieving a 3.5dB improvement in convergence to low Bit Error Rate (BER) compared to convolutional neural network (CNN)-based neural receivers, and an 8dB improvement compared to traditional baseline receiver configurations. Furthermore, our proposed system exhibits robust generalization capabilities, making it suitable for deployment in large-scale environments.