 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffects of Interfaces on Human-Robot Trust: Specifying and Visualizing Physical Zones
Dec 01, 2021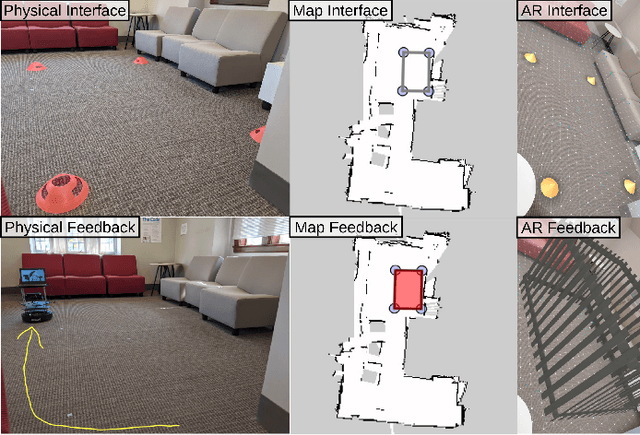

In this paper we investigate the influence interfaces and feedback have on human-robot trust levels when operating in a shared physical space. The task we use is specifying a "no-go" region for a robot in an indoor environment. We evaluate three styles of interface (physical, AR, and map-based) and four feedback mechanisms (no feedback, robot drives around the space, an AR "fence", and the region marked on the map). Our evaluation looks at both usability and trust. Specifically, if the participant trusts that the robot "knows" where the no-go region is and their confidence in the robot's ability to avoid that region. We use both self-reported and indirect measures of trust and usability. Our key findings are: 1) interfaces and feedback do influence levels of trust; 2) the participants largely preferred a mixed interface-feedback pair, where the modality for the interface differed from the feedback.