 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDroBoost: An Intelligent Score and Model Boosting Method for Drone Detection
Jun 30, 2024Drone detection is a challenging object detection task where visibility conditions and quality of the images may be unfavorable, and detections might become difficult due to complex backgrounds, small visible objects, and hard to distinguish objects. Both provide high confidence for drone detections, and eliminating false detections requires efficient algorithms and approaches. Our previous work, which uses YOLOv5, uses both real and synthetic data and a Kalman-based tracker to track the detections and increase their confidence using temporal information. Our current work improves on the previous approach by combining several improvements. We used a more diverse dataset combining multiple sources and combined with synthetic samples chosen from a large synthetic dataset based on the error analysis of the base model. Also, to obtain more resilient confidence scores for objects, we introduced a classification component that discriminates whether the object is a drone or not. Finally, we developed a more advanced scoring algorithm for object tracking that we use to adjust localization confidence. Furthermore, the proposed technique won 1st Place in the Drone vs. Bird Challenge (Workshop on Small-Drone Surveillance, Detection and Counteraction Techniques at ICIAP 2021).
Jury: A Comprehensive Evaluation Toolkit
Oct 03, 2023

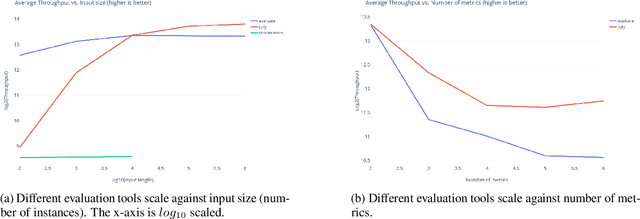
Evaluation plays a critical role in deep learning as a fundamental block of any prediction-based system. However, the vast number of Natural Language Processing (NLP) tasks and the development of various metrics have led to challenges in evaluating different systems with different metrics. To address these challenges, we introduce jury, a toolkit that provides a unified evaluation framework with standardized structures for performing evaluation across different tasks and metrics. The objective of jury is to standardize and improve metric evaluation for all systems and aid the community in overcoming the challenges in evaluation. Since its open-source release, jury has reached a wide audience and is available at https://github.com/obss/jury.
Increasing Data Diversity with Iterative Sampling to Improve Performance
Nov 05, 2021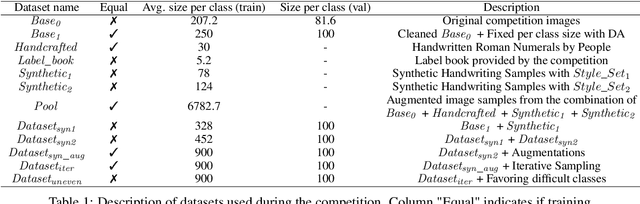


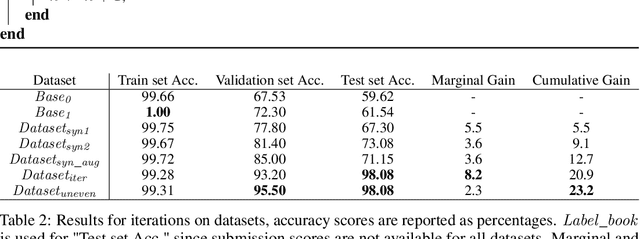
As a part of the Data-Centric AI Competition, we propose a data-centric approach to improve the diversity of the training samples by iterative sampling. The method itself relies strongly on the fidelity of augmented samples and the diversity of the augmentation methods. Moreover, we improve the performance further by introducing more samples for the difficult classes especially providing closer samples to edge cases potentially those the model at hand misclassifies.