 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Urban Last Mile Problem: Autonomous Drone Delivery to Your Balcony
Sep 21, 2018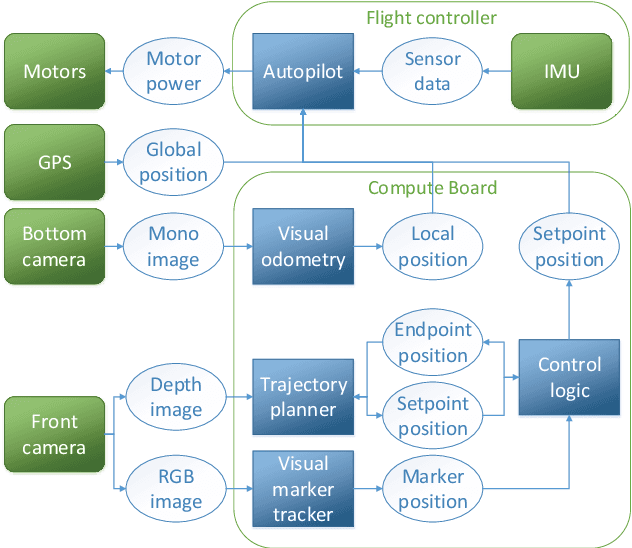
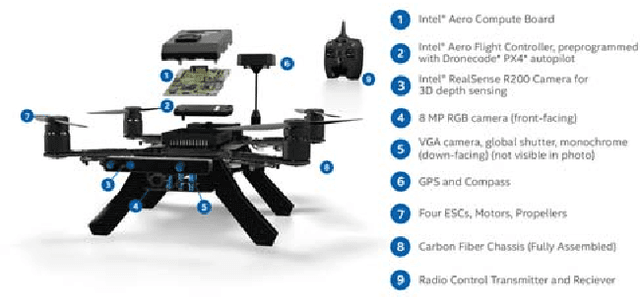
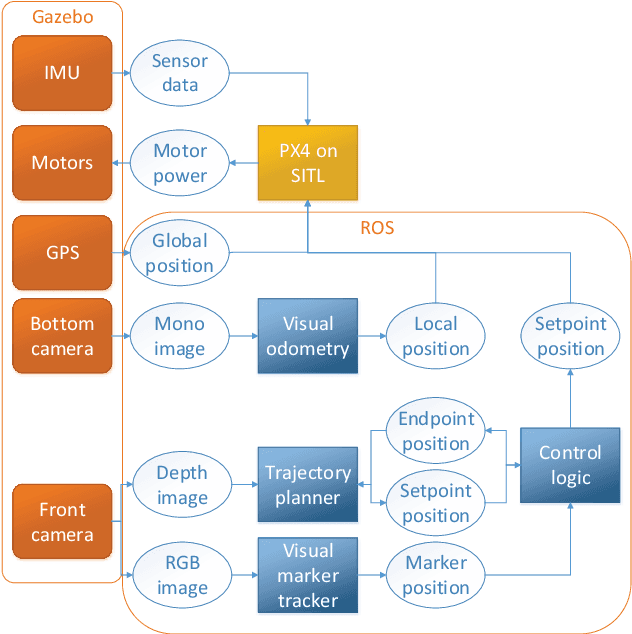
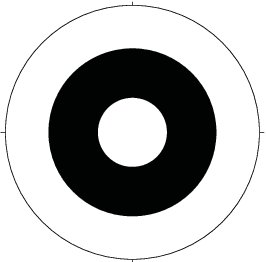
Drone delivery has been a hot topic in the industry in the past few years. However, existing approaches either focus on rural areas or rely on centralized drop-off locations from where the last mile delivery is performed. In this paper we tackle the problem of autonomous last mile delivery in urban environments using an off-the-shelf drone. We build a prototype system that is able to fly to the approximate delivery location using GPS and then find the exact drop-off location using visual navigation. The drop-off location could, e.g., be on a balcony or porch, and simply needs to be indicated by a visual marker on the wall or window. We test our system components in simulated environments, including the visual navigation and collision avoidance. Finally, we deploy our drone in a real-world environment and show how it can find the drop-off point on a balcony. To stimulate future research in this topic we open source our code.