 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNormalized gradient flow optimization in the training of ReLU artificial neural networks
Jul 13, 2022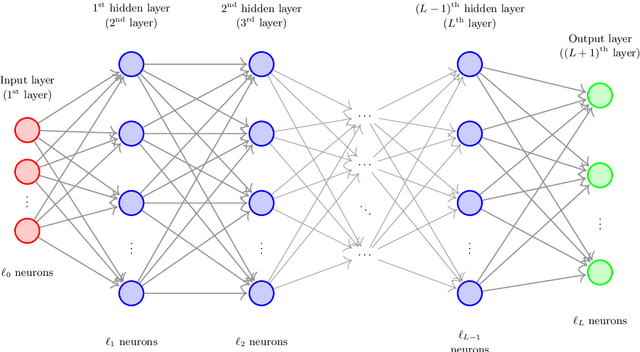
The training of artificial neural networks (ANNs) is nowadays a highly relevant algorithmic procedure with many applications in science and industry. Roughly speaking, ANNs can be regarded as iterated compositions between affine linear functions and certain fixed nonlinear functions, which are usually multidimensional versions of a one-dimensional so-called activation function. The most popular choice of such a one-dimensional activation function is the rectified linear unit (ReLU) activation function which maps a real number to its positive part $ \mathbb{R} \ni x \mapsto \max\{ x, 0 \} \in \mathbb{R} $. In this article we propose and analyze a modified variant of the standard training procedure of such ReLU ANNs in the sense that we propose to restrict the negative gradient flow dynamics to a large submanifold of the ANN parameter space, which is a strict $ C^{ \infty } $-submanifold of the entire ANN parameter space that seems to enjoy better regularity properties than the entire ANN parameter space but which is also sufficiently large and sufficiently high dimensional so that it can represent all ANN realization functions that can be represented through the entire ANN parameter space. In the special situation of shallow ANNs with just one-dimensional ANN layers we also prove for every Lipschitz continuous target function that every gradient flow trajectory on this large submanifold of the ANN parameter space is globally bounded. For the standard gradient flow on the entire ANN parameter space with Lipschitz continuous target functions it remains an open problem of research to prove or disprove the global boundedness of gradient flow trajectories even in the situation of shallow ANNs with just one-dimensional ANN layers.
Existence, uniqueness, and convergence rates for gradient flows in the training of artificial neural networks with ReLU activation
Aug 18, 2021The training of artificial neural networks (ANNs) with rectified linear unit (ReLU) activation via gradient descent (GD) type optimization schemes is nowadays a common industrially relevant procedure. Till this day in the scientific literature there is in general no mathematical convergence analysis which explains the numerical success of GD type optimization schemes in the training of ANNs with ReLU activation. GD type optimization schemes can be regarded as temporal discretization methods for the gradient flow (GF) differential equations associated to the considered optimization problem and, in view of this, it seems to be a natural direction of research to first aim to develop a mathematical convergence theory for time-continuous GF differential equations and, thereafter, to aim to extend such a time-continuous convergence theory to implementable time-discrete GD type optimization methods. In this article we establish two basic results for GF differential equations in the training of fully-connected feedforward ANNs with one hidden layer and ReLU activation. In the first main result of this article we establish in the training of such ANNs under the assumption that the probability distribution of the input data of the considered supervised learning problem is absolutely continuous with a bounded density function that every GF differential equation admits for every initial value a solution which is also unique among a suitable class of solutions. In the second main result of this article we prove in the training of such ANNs under the assumption that the target function and the density function of the probability distribution of the input data are piecewise polynomial that every non-divergent GF trajectory converges with an appropriate rate of convergence to a critical point and that the risk of the non-divergent GF trajectory converges with rate 1 to the risk of the critical point.