 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust maximum hands-off optimal control: existence, maximum principle, and $L^{0}$-$L^1$ equivalence
Jan 12, 2026This work advances the maximum hands-off sparse control framework by developing a robust counterpart for constrained linear systems with parametric uncertainties. The resulting optimal control problem minimizes an $L^{0}$ objective subject to an uncountable, compact family of constraints, and is therefore a nonconvex, nonsmooth robust optimization problem. To address this, we replace the $L^{0}$ objective with its convex $L^{1}$ surrogate and, using a nonsmooth variant of the robust Pontryagin maximum principle, show that the $L^{0}$ and $L^{1}$ formulations have identical sets of optimal solutions -- we call this the robust hands-off principle. Building on this equivalence, we propose an algorithmic framework -- drawing on numerically viable techniques from the semi-infinite robust optimization literature -- to solve the resulting problems. An illustrative example is provided to demonstrate the effectiveness of the approach.
Formation Shape Control using the Gromov-Wasserstein Metric
Mar 27, 2025
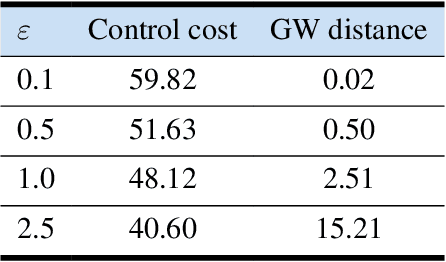
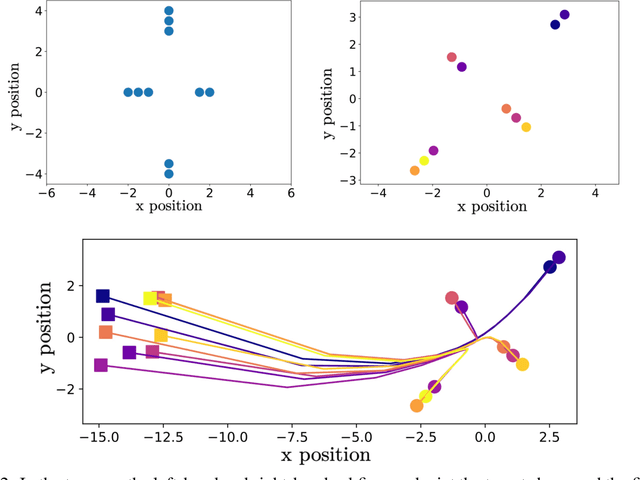
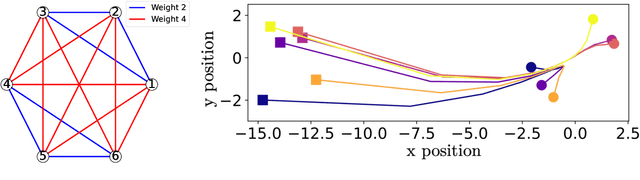
This article introduces a formation shape control algorithm, in the optimal control framework, for steering an initial population of agents to a desired configuration via employing the Gromov-Wasserstein distance. The underlying dynamical system is assumed to be a constrained linear system and the objective function is a sum of quadratic control-dependent stage cost and a Gromov-Wasserstein terminal cost. The inclusion of the Gromov-Wasserstein cost transforms the resulting optimal control problem into a well-known NP-hard problem, making it both numerically demanding and difficult to solve with high accuracy. Towards that end, we employ a recent semi-definite relaxation-driven technique to tackle the Gromov-Wasserstein distance. A numerical example is provided to illustrate our results.