 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploration of Finite 2D Square Grid by a Metamorphic Robotic System
Aug 01, 2018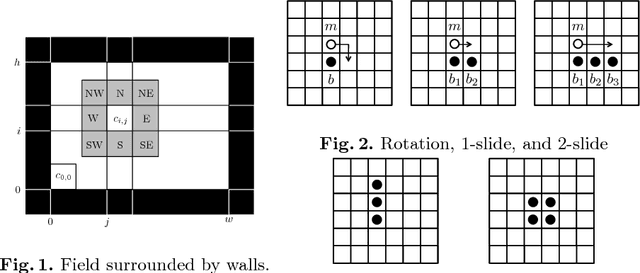
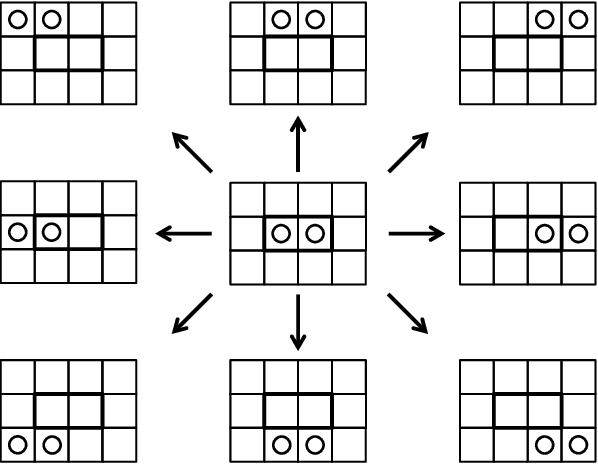
We consider exploration of finite 2D square grid by a metamorphic robotic system consisting of anonymous oblivious modules. The number of possible shapes of a metamorphic robotic system grows as the number of modules increases. The shape of the system serves as its memory and shows its functionality. We consider the effect of global compass on the minimum number of modules necessary to explore a finite 2D square grid. We show that if the modules agree on the directions (north, south, east, and west), three modules are necessary and sufficient for exploration from an arbitrary initial configuration, otherwise five modules are necessary and sufficient for restricted initial configurations.
Plane Formation by Synchronous Mobile Robots in the Three Dimensional Euclidean Space
Feb 16, 2016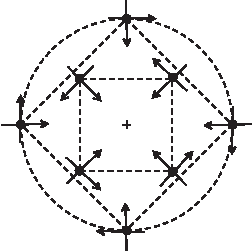

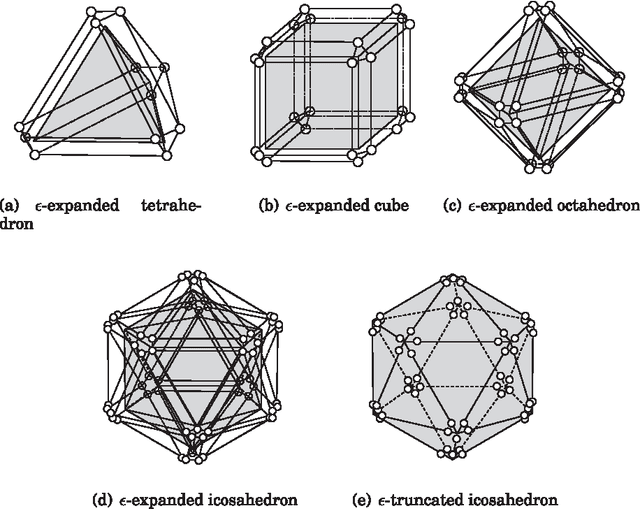
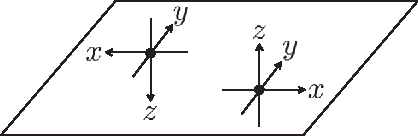
Creating a swarm of mobile computing entities frequently called robots, agents or sensor nodes, with self-organization ability is a contemporary challenge in distributed computing. Motivated by this, we investigate the plane formation problem that requires a swarm of robots moving in the three dimensional Euclidean space to land on a common plane. The robots are fully synchronous and endowed with visual perception. But they do not have identifiers, nor access to the global coordinate system, nor any means of explicit communication with each other. Though there are plenty of results on the agreement problem for robots in the two dimensional plane, for example, the point formation problem, the pattern formation problem, and so on, this is the first result for robots in the three dimensional space. This paper presents a necessary and sufficient condition for fully-synchronous robots to solve the plane formation problem that does not depend on obliviousness i.e., the availability of local memory at robots. An implication of the result is somewhat counter-intuitive: The robots cannot form a plane from most of the semi-regular polyhedra, while they can form a plane from every regular polyhedron (except a regular icosahedron), whose symmetry is usually considered to be higher than any semi-regular polyhedrdon.