 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDINO Pre-training for Vision-based End-to-end Autonomous Driving
Jul 15, 2024



In this article, we focus on the pre-training of visual autonomous driving agents in the context of imitation learning. Current methods often rely on a classification-based pre-training, which we hypothesise to be holding back from extending capabilities of implicit image understanding. We propose pre-training the visual encoder of a driving agent using the self-distillation with no labels (DINO) method, which relies on a self-supervised learning paradigm.% and is trained on an unrelated task. Our experiments in CARLA environment in accordance with the Leaderboard benchmark reveal that the proposed pre-training is more efficient than classification-based pre-training, and is on par with the recently proposed pre-training based on visual place recognition (VPRPre).
Measuring Statistical Dependencies via Maximum Norm and Characteristic Functions
Aug 16, 2022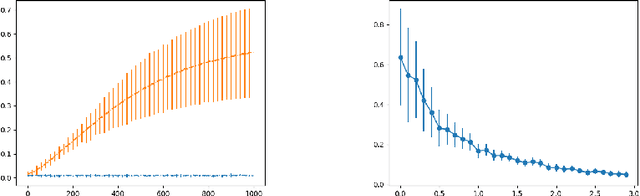
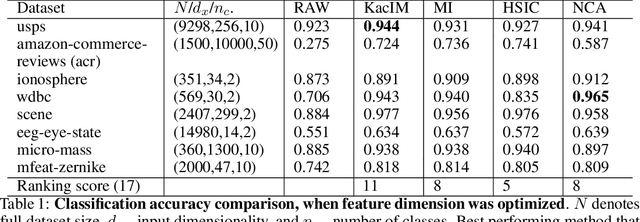
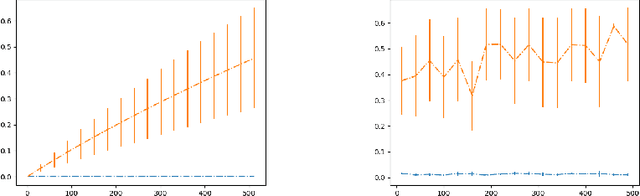

In this paper, we focus on the problem of statistical dependence estimation using characteristic functions. We propose a statistical dependence measure, based on the maximum-norm of the difference between joint and product-marginal characteristic functions. The proposed measure can detect arbitrary statistical dependence between two random vectors of possibly different dimensions, is differentiable, and easily integrable into modern machine learning and deep learning pipelines. We also conduct experiments both with simulated and real data. Our simulations show, that the proposed method can measure statistical dependencies in high-dimensional, non-linear data, and is less affected by the curse of dimensionality, compared to the previous work in this line of research. The experiments with real data demonstrate the potential applicability of our statistical measure for two different empirical inference scenarios, showing statistically significant improvement in the performance characteristics when applied for supervised feature extraction and deep neural network regularization. In addition, we provide a link to the accompanying open-source repository https://bit.ly/3d4ch5I.
Topological Navigation Graph
Oct 15, 2019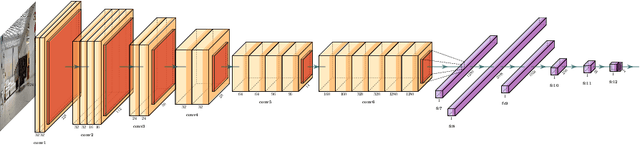
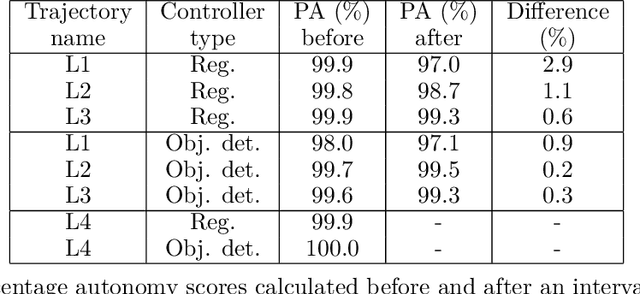
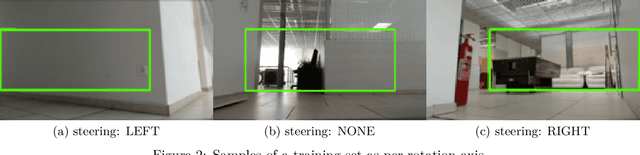
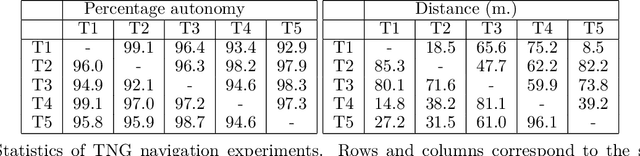
In this article, we focus on the utilisation of reactive trajectory imitation controllers for goal-directed mobile robot navigation. We propose a topological navigation graph (TNG) - an imitation-learning-based framework for navigating through environments with intersecting trajectories. The TNG framework represents the environment as a directed graph composed of deep neural networks. Each vertex of the graph corresponds to a trajectory and is represented by a trajectory identification classifier and a trajectory imitation controller. For trajectory following, we propose the novel use of neural object detection architectures. The edges of TNG correspond to intersections between trajectories and are all represented by a classifier. We provide empirical evaluation of the proposed navigation framework and its components in simulated and real-world environments, demonstrating that TNG allows us to utilise non-goal-directed, imitation-learning methods for goal-directed autonomous navigation.