 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComplexity Results and Fast Methods for Optimal Tabletop Rearrangement with Overhand Grasps
Nov 17, 2017

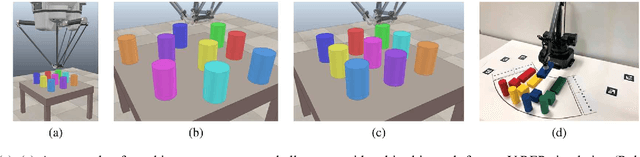
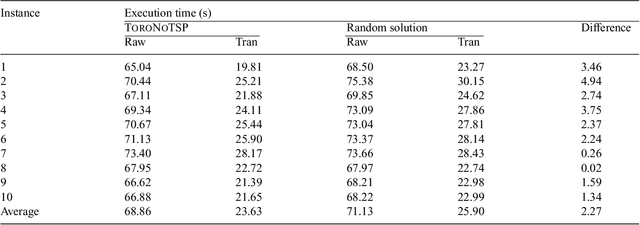
This paper studies the underlying combinatorial structure of a class of object rearrangement problems, which appear frequently in applications. The problems involve multiple, similar-geometry objects placed on a flat, horizontal surface, where a robot can approach them from above and perform pick-and-place operations to rearrange them. The paper considers both the case where the start and goal object poses overlap, and where they do not. For overlapping poses, the primary objective is to minimize the number of pick-and-place actions and then to minimize the distance traveled by the end-effector. For the non-overlapping case, the objective is solely to minimize the travel distance of the end-effector. While such problems do not involve all the complexities of general rearrangement, they remain computationally hard in both cases. This is shown through reductions from well-understood, hard combinatorial challenges to these rearrangement problems. The reductions are also shown to hold in the reverse direction, which enables the convenient application on rearrangement of well studied algorithms. These algorithms can be very efficient in practice despite the hardness results. The paper builds on these reduction results to propose an algorithmic pipeline for dealing with the rearrangement problems. Experimental evaluation, including hardware-based trials, shows that the proposed pipeline computes high-quality paths with regards to the optimization objectives. Furthermore, it exhibits highly desirable scalability as the number of objects increases in both the overlapping and non-overlapping setup.
A Portable, 3D-Printing Enabled Multi-Vehicle Platform for Robotics Research and Education
May 29, 2017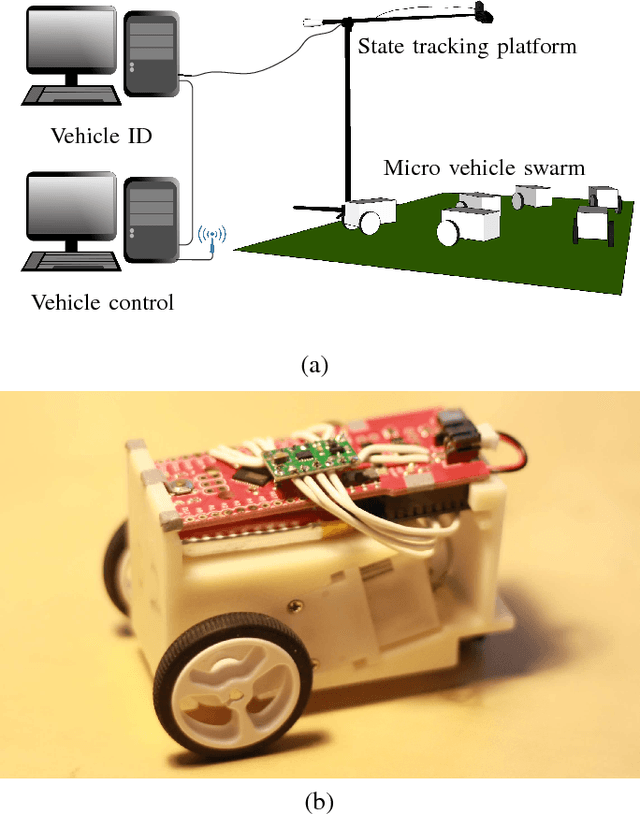
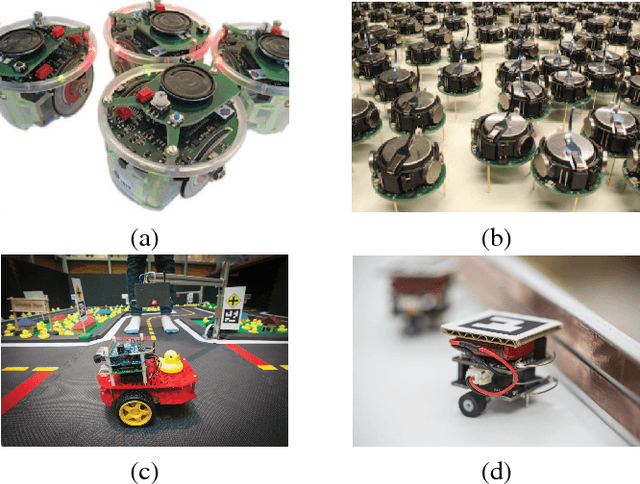
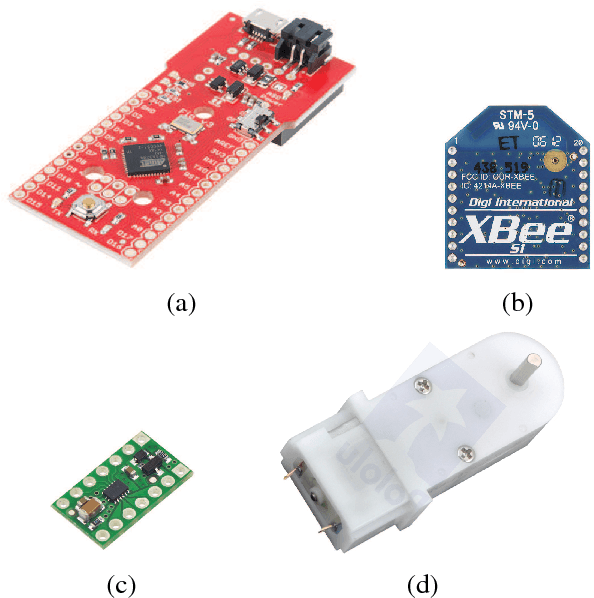
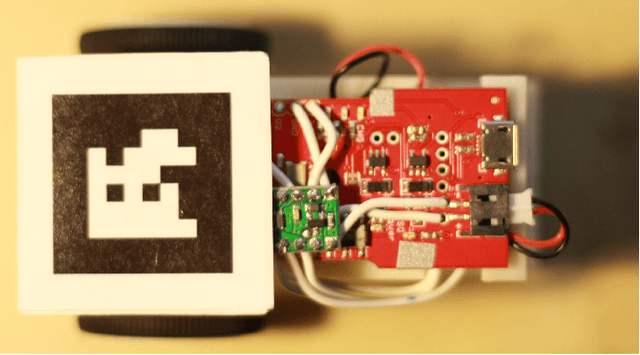
microMVP is an affordable, portable, and open source micro-scale mobile robot platform designed for robotics research and education. As a complete and unique multi-vehicle platform enabled by 3D printing and the maker culture, microMVP can be easily reproduced and requires little maintenance: a set of six micro vehicles, each measuring $8\times 5\times 6$ cubic centimeters and weighing under $100$ grams, and the accompanying tracking platform can be fully assembled in under two hours, all from readily available components. In this paper, we describe microMVP's hardware and software architecture, and the design thoughts that go into the making of the platform. The capabilities of microMVP APIs are then demonstrated with several single- and multi-robot path and motion planning algorithms. microMVP supports all common operation systems.