 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Scalable Continuous-Time Trajectory Optimization for Multi-Robot Navigation
Oct 29, 2019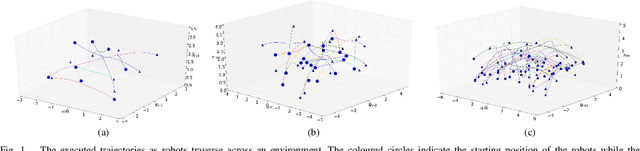
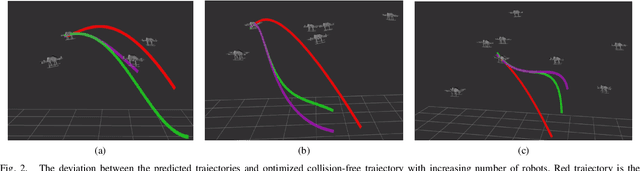
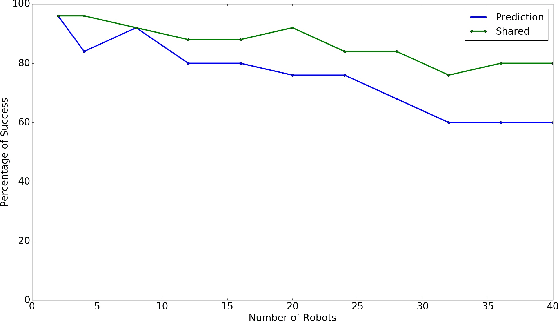
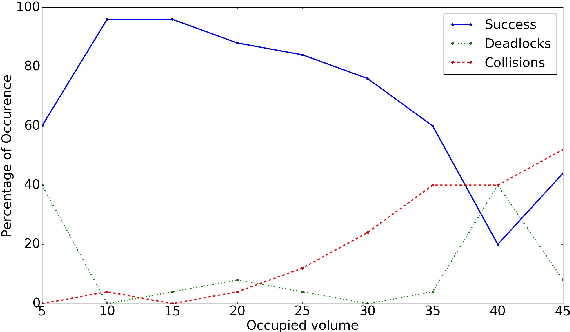
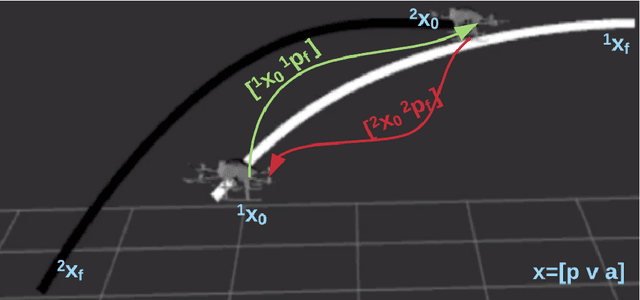
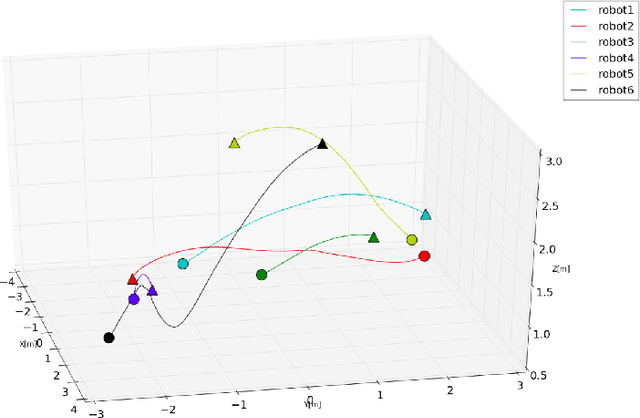
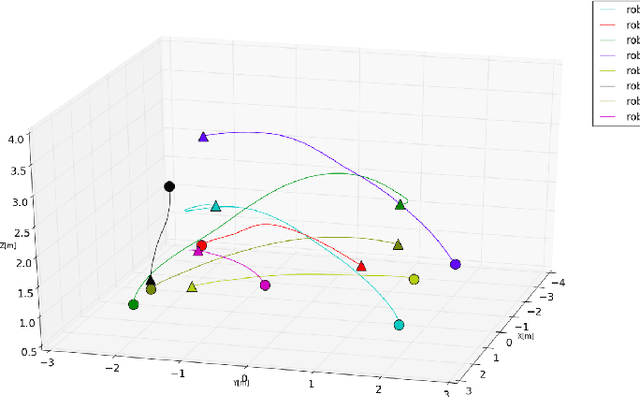
Scalable multi-robot transition is essential for ubiquitous adoption of robots. As a step towards it, a computationally efficient decentralized algorithm for continuous-time trajectory optimization in multi-robot scenarios based upon model predictive control is introduced. The robots communicate only their current states and goals rather than sharing their whole trajectory; using this data each robot predicts a continuous-time trajectory for every other robot exploiting optimal control based motion primitives that are corrected for spatial inter-robot interactions using least squares. A non linear program (NLP) is formulated for collision avoidance with the predicted trajectories of other robots. The NLP is condensed by using time as a parametrization resulting in an unconstrained optimization problem and can be solved in a fast and efficient manner. Additionally, the algorithm resizes the robot to accommodate it's trajectory tracking error. The algorithm was tested in simulations on Gazebo with aerial robots. Early results indicate that the proposed algorithm is efficient for upto forty homogeneous robots and twenty one heterogeneous robots occupying 20\% of the available space.
Continuous-Time Trajectory Optimization for Decentralized Multi-Robot Navigation
Sep 05, 2019
Multi-robot systems have begun to permeate into a variety of different fields, but collision-free navigation in a decentralized manner is still an arduous task. Typically, the navigation of high speed multi-robot systems demands replanning of trajectories to avoid collisions with one another. This paper presents an online replanning algorithm for trajectory optimization in labeled multi-robot scenarios. With reliable communication of states among robots, each robot predicts a smooth continuous-time trajectory for every other remaining robots. Based on the knowledge of these predicted trajectories, each robot then plans a collision-free trajectory for itself. The collision-free trajectory optimization problem is cast as a non linear program (NLP) by exploiting polynomial based trajectory generation. The algorithm was tested in simulations on Gazebo with aerial robots.
Online Decentralized Receding Horizon Trajectory Optimization for Multi-Robot systems
Dec 28, 2018



A novel decentralised trajectory generation algorithm for Multi Agent systems is presented. Multi-robot systems have the capacity to transform lives in a variety of fields. But, trajectory generation for multi-robot systems is still in its nascent stage and limited to heavily controlled environments. To overcome that, an online trajectory optimization algorithm that generates collision-free trajectories for robots, when given initial state and desired end pose, is proposed. It utilizes a simple method for obstacle detection, local shape based maps for obstacles and communication of robots' current states. Using the local maps, safe regions are formulated. Based upon the communicated data, trajectories are predicted for other robots and incorporated for collision-avoidance by resizing the regions of free space that the robot can be in without colliding. A trajectory is then optimized constraining the robot to remain within the safe region with the trajectories represented by piecewise polynomials parameterized by time. The algorithm is implemented using a receding horizon principle. The proposed algorithm is extensively tested in simulations on Gazebo using ROS with fourth order differentially flat aerial robots and non-holonomic second order wheeled robots in structured and unstructured environments.
Collision-Free Multi Robot Trajectory Optimization in Unknown Environments using Decentralized Trajectory Planning
Dec 03, 2018



Multi robot systems have the potential to be utilized in a variety of applications. In most of the previous works, the trajectory generation for multi robot systems is implemented in known environments. To overcome that we present an online trajectory optimization algorithm that utilizes communication of robots' current states to account to the other robots while using local object based maps for identifying obstacles. Based upon this data, we predict the trajectory expected to be traversed by the robots and utilize that to avoid collisions by formulating regions of free space that the robot can be without colliding with other robots and obstacles. A trajectory is optimized constraining the robot to remain within this region.The proposed method is tested in simulations on Gazebo using ROS.
A Look at Motion Planning for Autonomous Vehicles at an Intersection
Sep 07, 2018

Autonomous Vehicles are currently being tested in a variety of scenarios. As we move towards Autonomous Vehicles, how should intersections look? To answer that question, we break down an intersection management into the different conundrums and scenarios involved in the trajectory planning and current approaches to solve them. Then, a brief analysis of current works in autonomous intersection is conducted. With a critical eye, we try to delve into the discrepancies of existing solutions while presenting some critical and important factors that have been addressed. Furthermore, open issues that have to be addressed are also emphasized. We also try to answer the question of how to benchmark intersection management algorithms by providing some factors that impact autonomous navigation at intersection.