 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA variational autoencoder approach for choice set generation and implicit perception of alternatives in choice modeling
Jun 19, 2021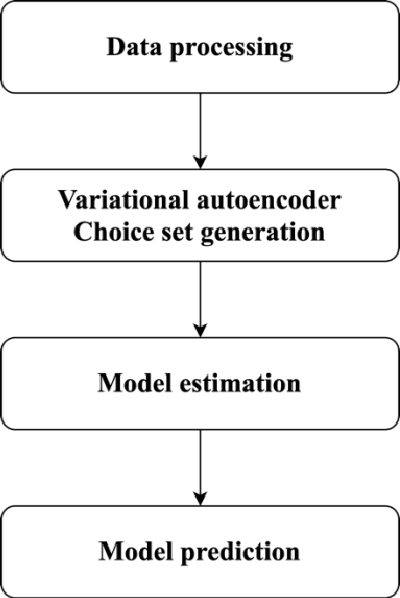
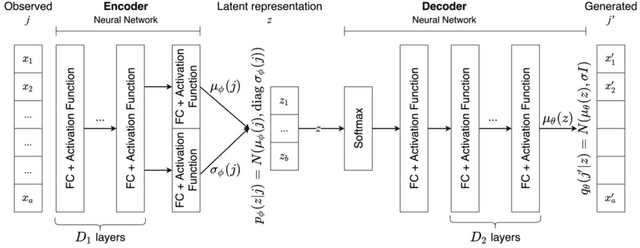

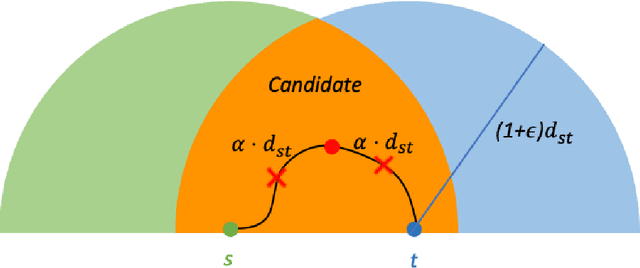
This paper derives the generalized extreme value (GEV) model with implicit availability/perception (IAP) of alternatives and proposes a variational autoencoder (VAE) approach for choice set generation and implicit perception of alternatives. Specifically, the cross-nested logit (CNL) model with IAP is derived as an example of IAP-GEV models. The VAE approach is adapted to model the choice set generation process, in which the likelihood of perceiving chosen alternatives in the choice set is maximized. The VAE approach for route choice set generation is exemplified using a real dataset. IAP- CNL model estimated has the best performance in terms of goodness-of-fit and prediction performance, compared to multinomial logit models and conventional choice set generation methods.
Experiments on route choice set generation using a large GPS trajectory set
May 22, 2020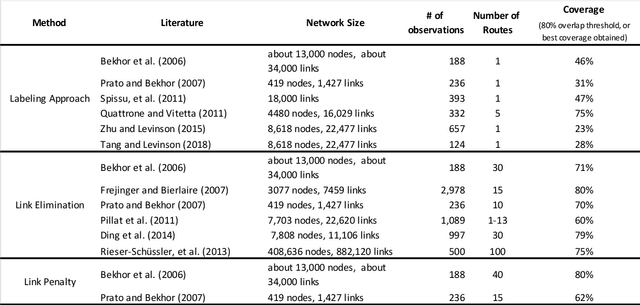
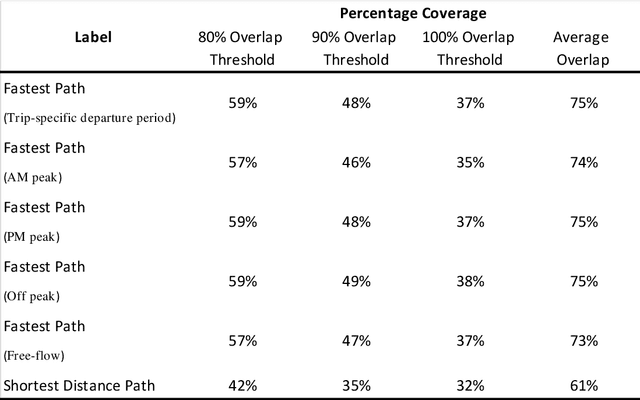
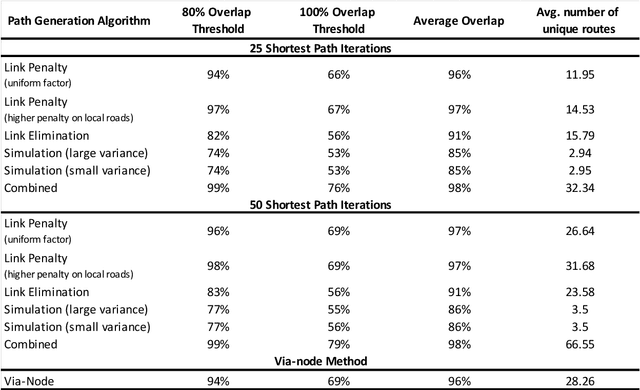
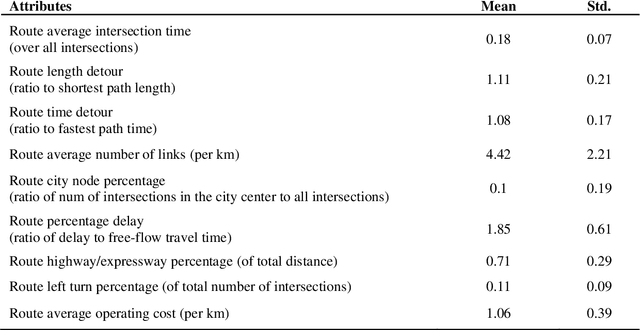
Several route choice models developed in the literature were based on a relatively small number of observations. With the extensive use of tracking devices in recent surveys, there is a possibility to obtain insights with respect to the traveler's choice behavior. In this paper, different path generation algorithms are evaluated using a large GPS trajectory dataset. The dataset contains 6,000 observations from Tel-Aviv metropolitan area. An initial analysis is performed by generating a single route based on the shortest path. Almost 60% percent of the 6,000 observations can be covered (assuming a threshold of 80% overlap) using a single path. This result significantly contrasts previous literature findings. Link penalty, link elimination, simulation and via-node methods are applied to generate route sets, and the consistency of the algorithms are compared. A modified link penalty method, which accounts for preference of using higher hierarchical roads, provides a route set with 97% coverage (80% overlap threshold). The via-node method produces route set with satisfying coverage, and generates routes that are more heterogeneous (in terms number of links and routes ratio).
Optimal Dynamic Coverage Infrastructure for Large-Scale Fleets of Reconnaissance UAVs
Nov 17, 2016
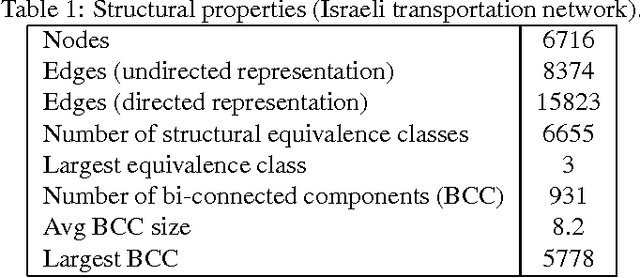
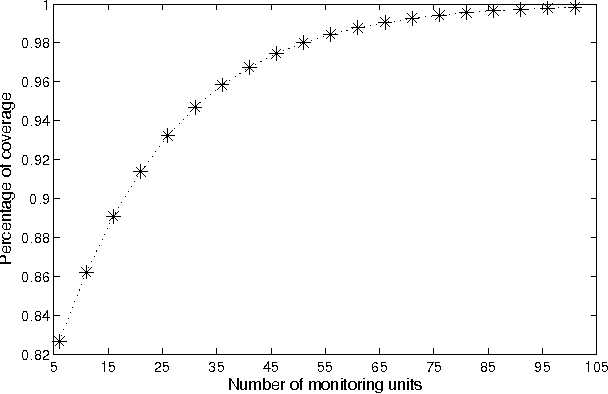
Current state of the art in the field of UAV activation relies solely on human operators for the design and adaptation of the drones' flying routes. Furthermore, this is being done today on an individual level (one vehicle per operators), with some exceptions of a handful of new systems, that are comprised of a small number of self-organizing swarms, manually guided by a human operator. Drones-based monitoring is of great importance in variety of civilian domains, such as road safety, homeland security, and even environmental control. In its military aspect, efficiently detecting evading targets by a fleet of unmanned drones has an ever increasing impact on the ability of modern armies to engage in warfare. The latter is true both traditional symmetric conflicts among armies as well as asymmetric ones. Be it a speeding driver, a polluting trailer or a covert convoy, the basic challenge remains the same -- how can its detection probability be maximized using as little number of drones as possible. In this work we propose a novel approach for the optimization of large scale swarms of reconnaissance drones -- capable of producing on-demand optimal coverage strategies for any given search scenario. Given an estimation cost of the threat's potential damages, as well as types of monitoring drones available and their comparative performance, our proposed method generates an analytically provable strategy, stating the optimal number and types of drones to be deployed, in order to cost-efficiently monitor a pre-defined region for targets maneuvering using a given roads networks. We demonstrate our model using a unique dataset of the Israeli transportation network, on which different deployment schemes for drones deployment are evaluated.