 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear time small coresets for k-mean clustering of segments with applications
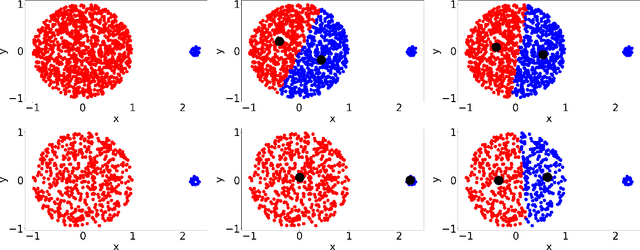
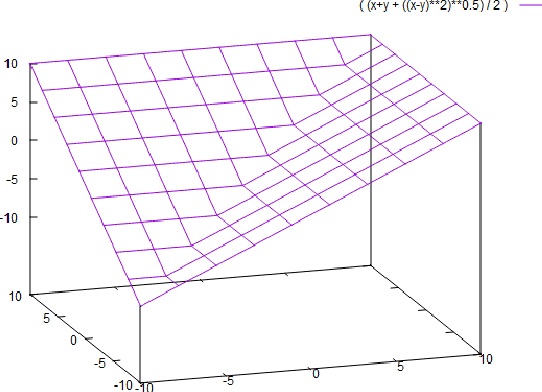
Nov 16, 2025We study the $k$-means problem for a set $\mathcal{S} \subseteq \mathbb{R}^d$ of $n$ segments, aiming to find $k$ centers $X \subseteq \mathbb{R}^d$ that minimize $D(\mathcal{S},X) := \sum_{S \in \mathcal{S}} \min_{x \in X} D(S,x)$, where $D(S,x) := \int_{p \in S} |p - x| dp$ measures the total distance from each point along a segment to a center. Variants of this problem include handling outliers, employing alternative distance functions such as M-estimators, weighting distances to achieve balanced clustering, or enforcing unique cluster assignments. For any $\varepsilon > 0$, an $\varepsilon$-coreset is a weighted subset $C \subseteq \mathbb{R}^d$ that approximates $D(\mathcal{S},X)$ within a factor of $1 \pm \varepsilon$ for any set of $k$ centers, enabling efficient streaming, distributed, or parallel computation. We propose the first coreset construction that provably handles arbitrary input segments. For constant $k$ and $\varepsilon$, it produces a coreset of size $O(\log^2 n)$ computable in $O(nd)$ time. Experiments, including a real-time video tracking application, demonstrate substantial speedups with minimal loss in clustering accuracy, confirming both the practical efficiency and theoretical guarantees of our method.
Provable Imbalanced Point Clustering
Aug 26, 2024
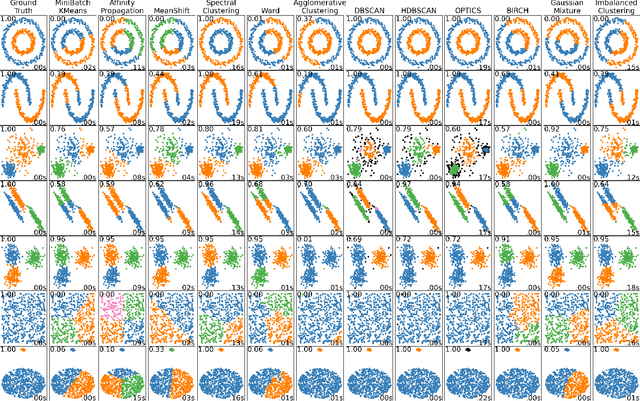
We suggest efficient and provable methods to compute an approximation for imbalanced point clustering, that is, fitting $k$-centers to a set of points in $\mathbb{R}^d$, for any $d,k\geq 1$. To this end, we utilize \emph{coresets}, which, in the context of the paper, are essentially weighted sets of points in $\mathbb{R}^d$ that approximate the fitting loss for every model in a given set, up to a multiplicative factor of $1\pm\varepsilon$. We provide [Section 3 and Section E in the appendix] experiments that show the empirical contribution of our suggested methods for real images (novel and reference), synthetic data, and real-world data. We also propose choice clustering, which by combining clustering algorithms yields better performance than each one separately.
Distributed Coordination Based on Quantum Entanglement
Oct 19, 2022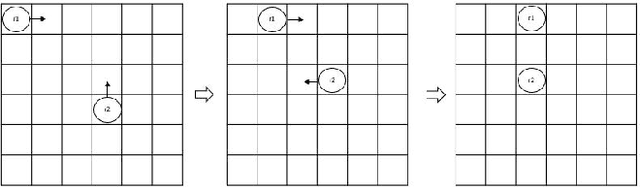
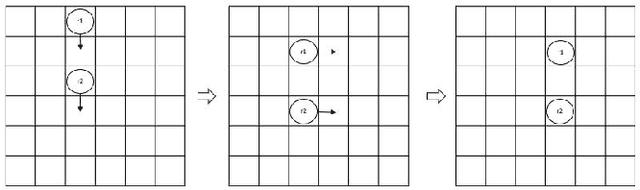
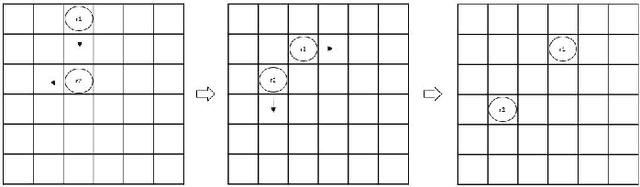
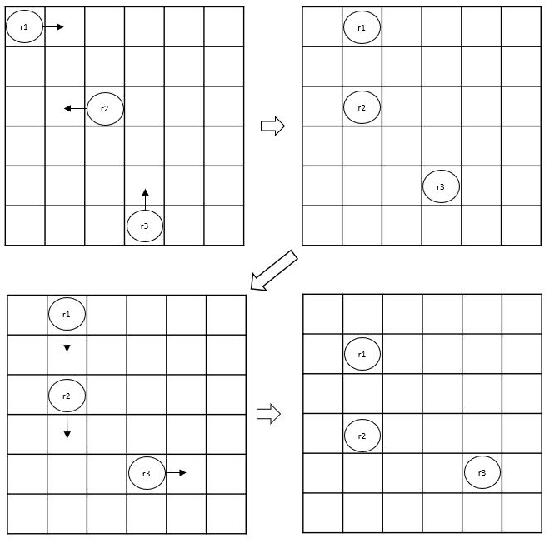
This paper demonstrates and proves that the coordination of actions in a distributed swarm can be enhanced by using quantum entanglement. In particular, we focus on - Global and local simultaneous random walks, using entangled qubits that collapse into the same (or opposite) direction, either random direction or totally controlled simultaneous movements. - Identifying eavesdropping from malicious eavesdroppers aimed at disturbing the simultaneous random walks by using entangled qubits that were sent at random or with predefined bases. - Identifying Byzantine robots or malicious robots that are trying to gain secret information or are attacking the system using entangled qubits. - The use of Pseudo Telepathy to coordinate robots' actions.
PolyDNN: Polynomial Representation of NN for Communication-less SMPC Inference
Apr 28, 2021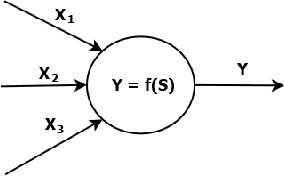
The structure and weights of Deep Neural Networks (DNN) typically encode and contain very valuable information about the dataset that was used to train the network. One way to protect this information when DNN is published is to perform an interference of the network using secure multi-party computations (MPC). In this paper, we suggest a translation of deep neural networks to polynomials, which are easier to calculate efficiently with MPC techniques. We show a way to translate complete networks into a single polynomial and how to calculate the polynomial with an efficient and information-secure MPC algorithm. The calculation is done without intermediate communication between the participating parties, which is beneficial in several cases, as explained in the paper.
RoboCast: Asynchronous Communication in Robot Networks
Sep 23, 2010
This paper introduces the \emph{RoboCast} communication abstraction. The RoboCast allows a swarm of non oblivious, anonymous robots that are only endowed with visibility sensors and do not share a common coordinate system, to asynchronously exchange information. We propose a generic framework that covers a large class of asynchronous communication algorithms and show how our framework can be used to implement fundamental building blocks in robot networks such as gathering or stigmergy. In more details, we propose a RoboCast algorithm that allows robots to broadcast their local coordinate systems to each others. Our algorithm is further refined with a local collision avoidance scheme. Then, using the RoboCast primitive, we propose algorithms for deterministic asynchronous gathering and binary information exchange.