 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMISC: Minimal Intervention Shared Control with Guaranteed Safety under Non-Convex Constraints
Jul 03, 2025Shared control combines human intention with autonomous decision-making, from low-level safety overrides to high-level task guidance, enabling systems that adapt to users while ensuring safety and performance. This enhances task effectiveness and user experience across domains such as assistive robotics, teleoperation, and autonomous driving. However, existing shared control methods, based on e.g. Model Predictive Control, Control Barrier Functions, or learning-based control, struggle with feasibility, scalability, or safety guarantees, particularly since the user input is unpredictable. To address these challenges, we propose an assistive controller framework based on Constrained Optimal Control Problem that incorporates an offline-computed Control Invariant Set, enabling online computation of control actions that ensure feasibility, strict constraint satisfaction, and minimal override of user intent. Moreover, the framework can accommodate structured class of non-convex constraints, which are common in real-world scenarios. We validate the approach through a large-scale user study with 66 participants--one of the most extensive in shared control research--using a computer game environment to assess task load, trust, and perceived control, in addition to performance. The results show consistent improvements across all these aspects without compromising safety and user intent.
Jointly Learning Cost and Constraints from Demonstrations for Safe Trajectory Generation
May 06, 2024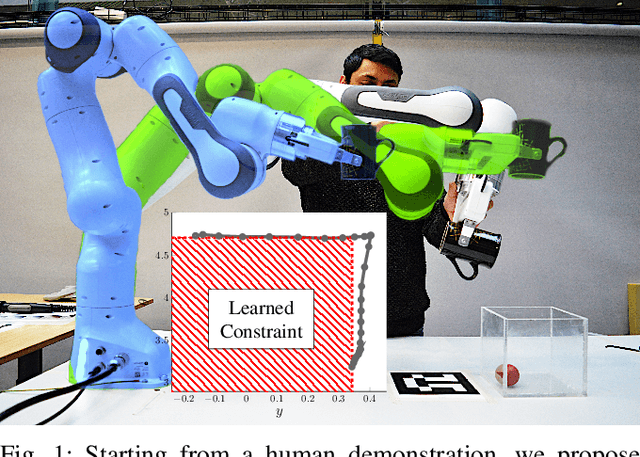
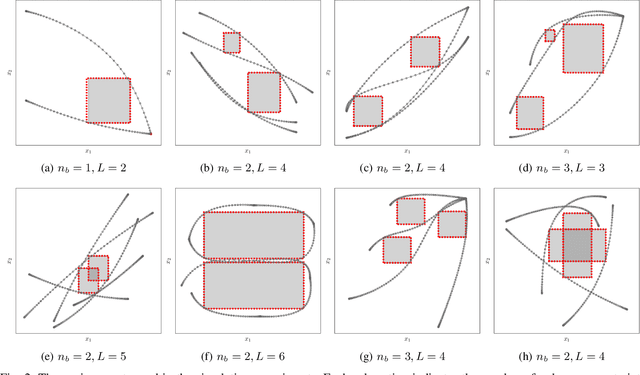
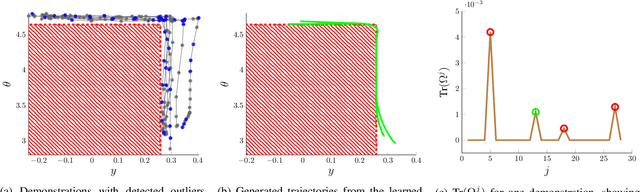
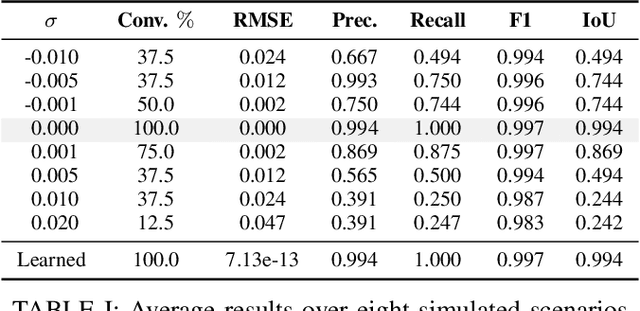
Learning from Demonstration allows robots to mimic human actions. However, these methods do not model constraints crucial to ensure safety of the learned skill. Moreover, even when explicitly modelling constraints, they rely on the assumption of a known cost function, which limits their practical usability for task with unknown cost. In this work we propose a two-step optimization process that allow to estimate cost and constraints by decoupling the learning of cost functions from the identification of unknown constraints within the demonstrated trajectories. Initially, we identify the cost function by isolating the effect of constraints on parts of the demonstrations. Subsequently, a constraint leaning method is used to identify the unknown constraints. Our approach is validated both on simulated trajectories and a real robotic manipulation task. Our experiments show the impact that incorrect cost estimation has on the learned constraints and illustrate how the proposed method is able to infer unknown constraints, such as obstacles, from demonstrated trajectories without any initial knowledge of the cost.