 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Stochastic Processes through Replay Buffers
Jun 26, 2022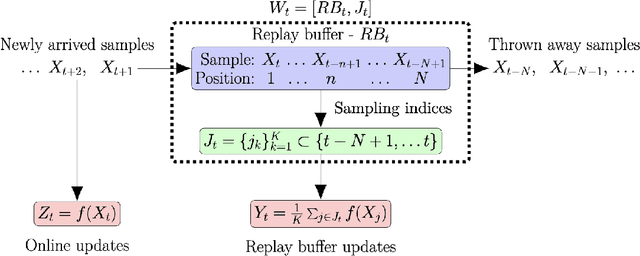
Replay buffers are a key component in many reinforcement learning schemes. Yet, their theoretical properties are not fully understood. In this paper we analyze a system where a stochastic process X is pushed into a replay buffer and then randomly sampled to generate a stochastic process Y from the replay buffer. We provide an analysis of the properties of the sampled process such as stationarity, Markovity and autocorrelation in terms of the properties of the original process. Our theoretical analysis sheds light on why replay buffer may be a good de-correlator. Our analysis provides theoretical tools for proving the convergence of replay buffer based algorithms which are prevalent in reinforcement learning schemes.
Sim and Real: Better Together
Oct 05, 2021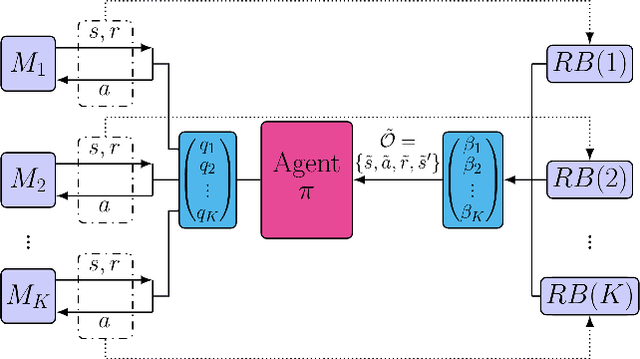
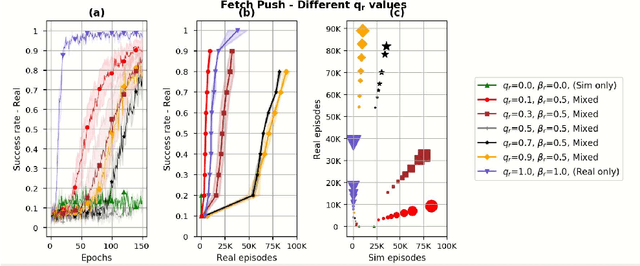
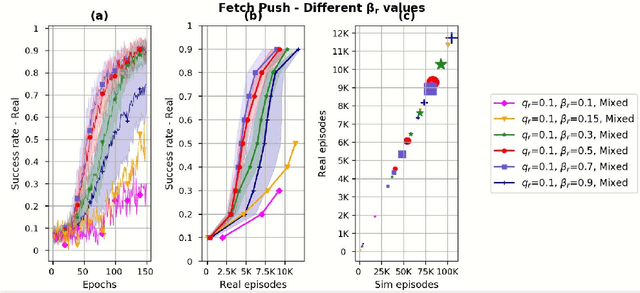
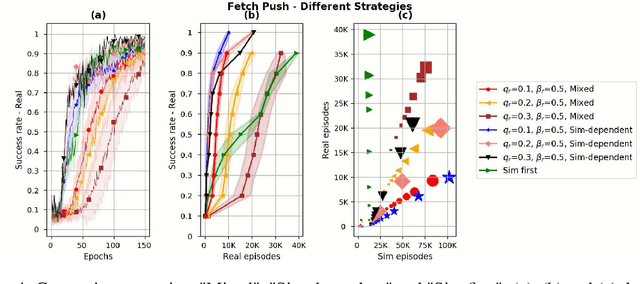
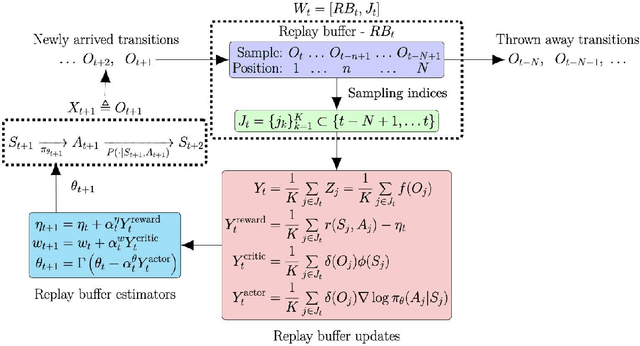
Simulation is used extensively in autonomous systems, particularly in robotic manipulation. By far, the most common approach is to train a controller in simulation, and then use it as an initial starting point for the real system. We demonstrate how to learn simultaneously from both simulation and interaction with the real environment. We propose an algorithm for balancing the large number of samples from the high throughput but less accurate simulation and the low-throughput, high-fidelity and costly samples from the real environment. We achieve that by maintaining a replay buffer for each environment the agent interacts with. We analyze such multi-environment interaction theoretically, and provide convergence properties, through a novel theoretical replay buffer analysis. We demonstrate the efficacy of our method on a sim-to-real environment.