 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simple Baseline for Efficient Hand Mesh Reconstruction
Mar 04, 2024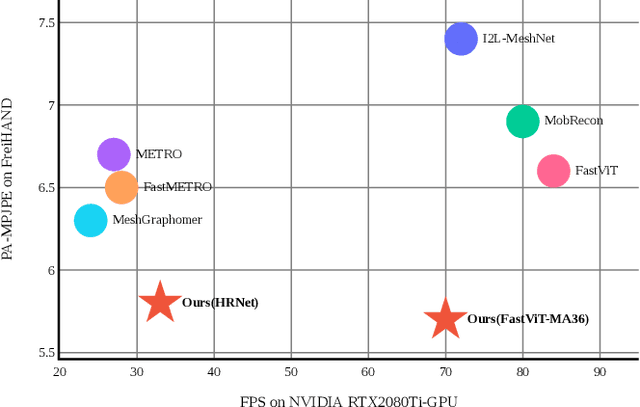
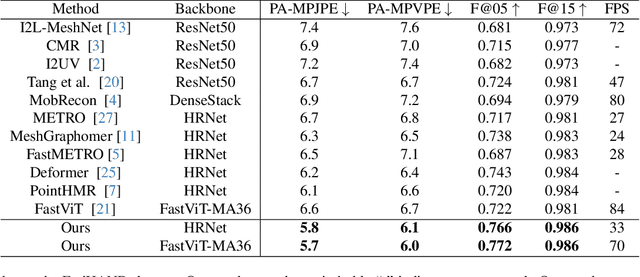
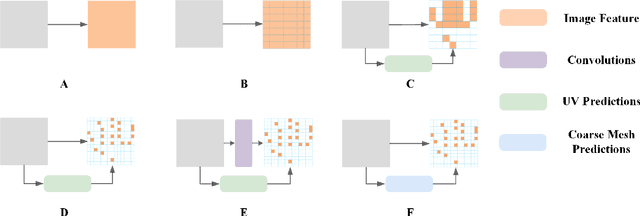
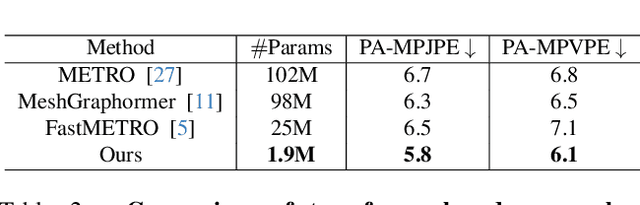
3D hand pose estimation has found broad application in areas such as gesture recognition and human-machine interaction tasks. As performance improves, the complexity of the systems also increases, which can limit the comparative analysis and practical implementation of these methods. In this paper, we propose a simple yet effective baseline that not only surpasses state-of-the-art (SOTA) methods but also demonstrates computational efficiency. To establish this baseline, we abstract existing work into two components: a token generator and a mesh regressor, and then examine their core structures. A core structure, in this context, is one that fulfills intrinsic functions, brings about significant improvements, and achieves excellent performance without unnecessary complexities. Our proposed approach is decoupled from any modifications to the backbone, making it adaptable to any modern models. Our method outperforms existing solutions, achieving state-of-the-art (SOTA) results across multiple datasets. On the FreiHAND dataset, our approach produced a PA-MPJPE of 5.7mm and a PA-MPVPE of 6.0mm. Similarly, on the Dexycb dataset, we observed a PA-MPJPE of 5.5mm and a PA-MPVPE of 5.0mm. As for performance speed, our method reached up to 33 frames per second (fps) when using HRNet and up to 70 fps when employing FastViT-MA36