 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHiCrowd: Hierarchical Crowd Flow Alignment for Dense Human Environments
Feb 05, 2026Navigating through dense human crowds remains a significant challenge for mobile robots. A key issue is the freezing robot problem, where the robot struggles to find safe motions and becomes stuck within the crowd. To address this, we propose HiCrowd, a hierarchical framework that integrates reinforcement learning (RL) with model predictive control (MPC). HiCrowd leverages surrounding pedestrian motion as guidance, enabling the robot to align with compatible crowd flows. A high-level RL policy generates a follow point to align the robot with a suitable pedestrian group, while a low-level MPC safely tracks this guidance with short horizon planning. The method combines long-term crowd aware decision making with safe short-term execution. We evaluate HiCrowd against reactive and learning-based baselines in offline setting (replaying recorded human trajectories) and online setting (human trajectories are updated to react to the robot in simulation). Experiments on a real-world dataset and a synthetic crowd dataset show that our method outperforms in navigation efficiency and safety, while reducing freezing behaviors. Our results suggest that leveraging human motion as guidance, rather than treating humans solely as dynamic obstacles, provides a powerful principle for safe and efficient robot navigation in crowds.
Learning Extrinsic Dexterity with Parameterized Manipulation Primitives
Nov 02, 2023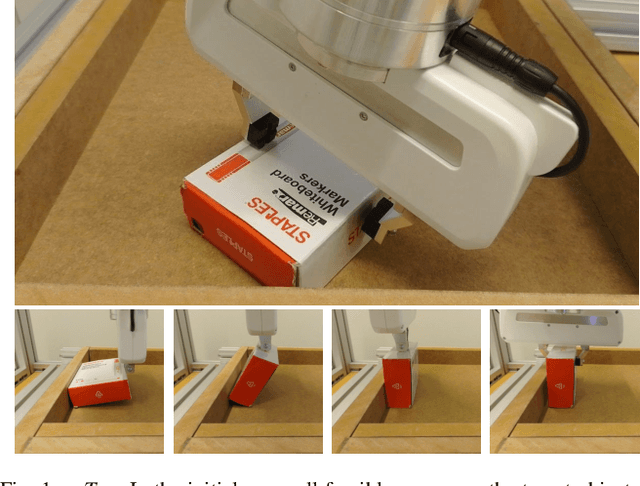

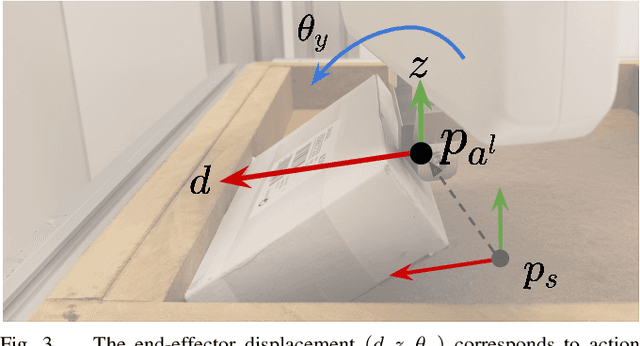
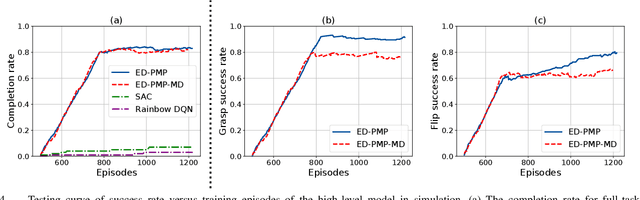
Many practically relevant robot grasping problems feature a target object for which all grasps are occluded, e.g., by the environment. Single-shot grasp planning invariably fails in such scenarios. Instead, it is necessary to first manipulate the object into a configuration that affords a grasp. We solve this problem by learning a sequence of actions that utilize the environment to change the object's pose. Concretely, we employ hierarchical reinforcement learning to combine a sequence of learned parameterized manipulation primitives. By learning the low-level manipulation policies, our approach can control the object's state through exploiting interactions between the object, the gripper, and the environment. Designing such a complex behavior analytically would be infeasible under uncontrolled conditions, as an analytic approach requires accurate physical modeling of the interaction and contact dynamics. In contrast, we learn a hierarchical policy model that operates directly on depth perception data, without the need for object detection, pose estimation, or manual design of controllers. We evaluate our approach on picking box-shaped objects of various weight, shape, and friction properties from a constrained table-top workspace. Our method transfers to a real robot and is able to successfully complete the object picking task in 98\% of experimental trials.