 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNoise2NoiseFlow: Realistic Camera Noise Modeling without Clean Images
Jun 02, 2022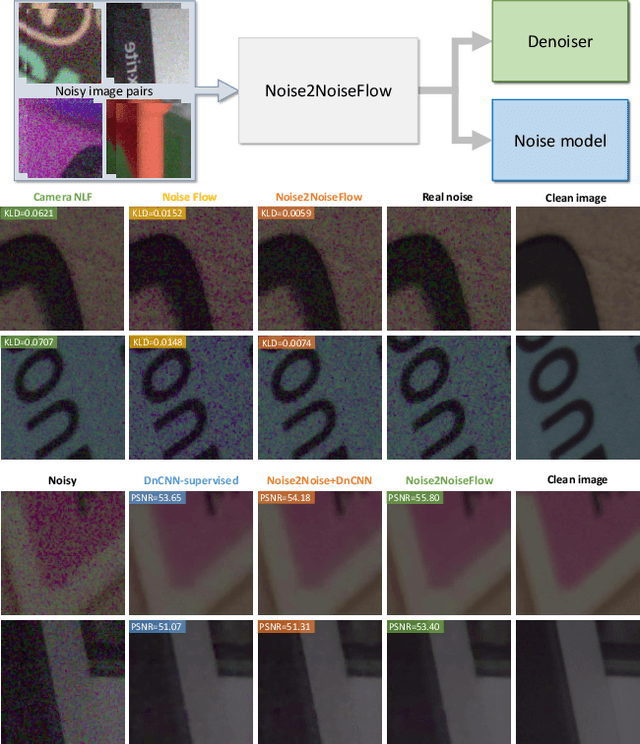
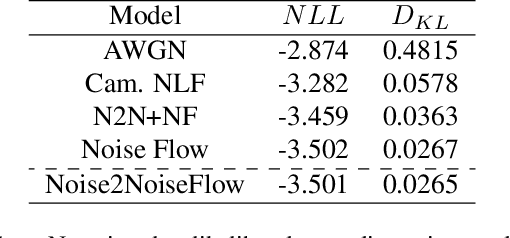
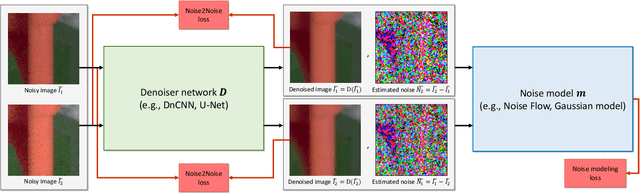
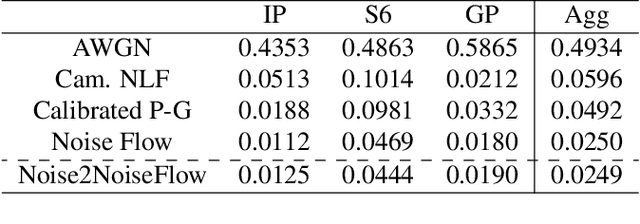
Image noise modeling is a long-standing problem with many applications in computer vision. Early attempts that propose simple models, such as signal-independent additive white Gaussian noise or the heteroscedastic Gaussian noise model (a.k.a., camera noise level function) are not sufficient to learn the complex behavior of the camera sensor noise. Recently, more complex learning-based models have been proposed that yield better results in noise synthesis and downstream tasks, such as denoising. However, their dependence on supervised data (i.e., paired clean images) is a limiting factor given the challenges in producing ground-truth images. This paper proposes a framework for training a noise model and a denoiser simultaneously while relying only on pairs of noisy images rather than noisy/clean paired image data. We apply this framework to the training of the Noise Flow architecture. The noise synthesis and density estimation results show that our framework outperforms previous signal-processing-based noise models and is on par with its supervised counterpart. The trained denoiser is also shown to significantly improve upon both supervised and weakly supervised baseline denoising approaches. The results indicate that the joint training of a denoiser and a noise model yields significant improvements in the denoiser.
Modeling sRGB Camera Noise with Normalizing Flows
Jun 02, 2022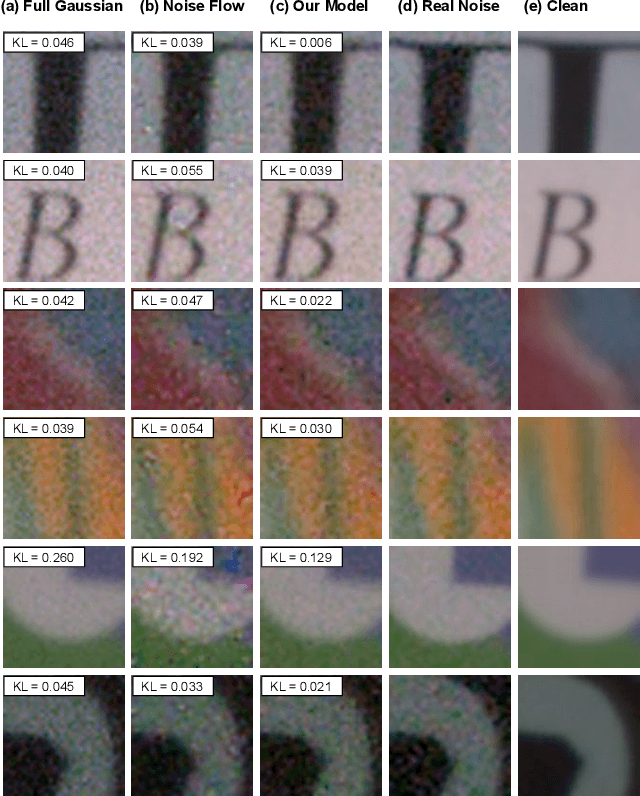
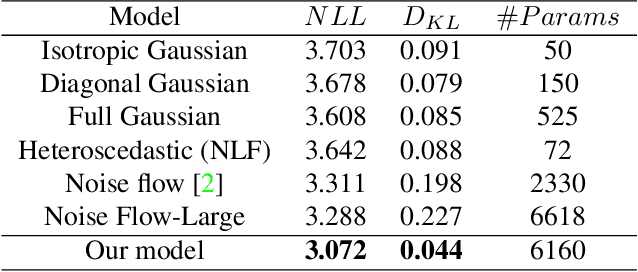
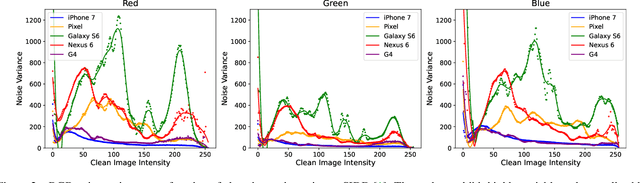
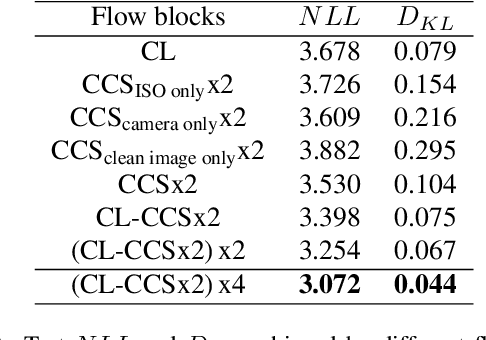
Noise modeling and reduction are fundamental tasks in low-level computer vision. They are particularly important for smartphone cameras relying on small sensors that exhibit visually noticeable noise. There has recently been renewed interest in using data-driven approaches to improve camera noise models via neural networks. These data-driven approaches target noise present in the raw-sensor image before it has been processed by the camera's image signal processor (ISP). Modeling noise in the RAW-rgb domain is useful for improving and testing the in-camera denoising algorithm; however, there are situations where the camera's ISP does not apply denoising or additional denoising is desired when the RAW-rgb domain image is no longer available. In such cases, the sensor noise propagates through the ISP to the final rendered image encoded in standard RGB (sRGB). The nonlinear steps on the ISP culminate in a significantly more complex noise distribution in the sRGB domain and existing raw-domain noise models are unable to capture the sRGB noise distribution. We propose a new sRGB-domain noise model based on normalizing flows that is capable of learning the complex noise distribution found in sRGB images under various ISO levels. Our normalizing flows-based approach outperforms other models by a large margin in noise modeling and synthesis tasks. We also show that image denoisers trained on noisy images synthesized with our noise model outperforms those trained with noise from baselines models.
Zero-shot Learning with Class Description Regularization
Jun 30, 2021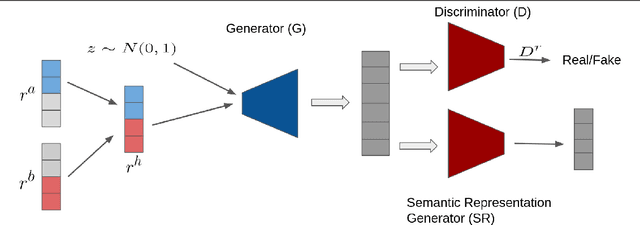
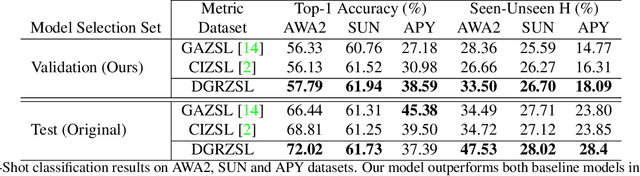
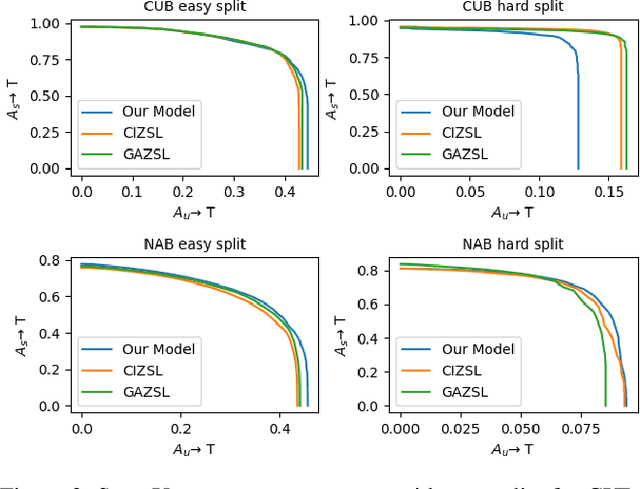
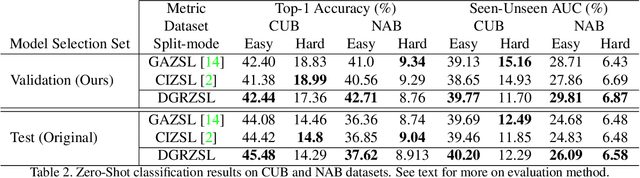
The purpose of generative Zero-shot learning (ZSL) is to learning from seen classes, transfer the learned knowledge, and create samples of unseen classes from the description of these unseen categories. To achieve better ZSL accuracies, models need to better understand the descriptions of unseen classes. We introduce a novel form of regularization that encourages generative ZSL models to pay more attention to the description of each category. Our empirical results demonstrate improvements over the performance of multiple state-of-the-art models on the task of generalized zero-shot recognition and classification when trained on textual description-based datasets like CUB and NABirds and attribute-based datasets like AWA2, aPY and SUN.