 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning for Aerial Robot Teams for Wide-Area Biometric and Phenotypic Data Collection
Nov 03, 2020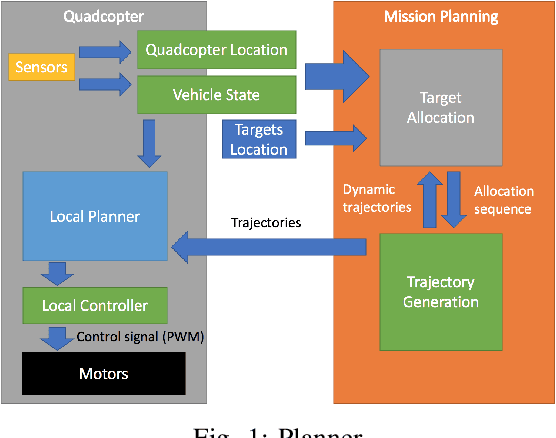


This work presents an efficient and implementable solution to the problem of joint task allocation and path planning in a multi-UAV platform deployed for biometric data collection in-the-wild. The sensing requirement associated with the task gives rise to an uncanny variant of the traditional vehicle routing problem with coverage/sensing constraints. As is the case in several multi-robot path-planning problems, our problem reduces to an $m$TSP problem. In order to tame the computational challenges associated with the problem, we propose a hierarchical solution that decouples the vehicle routing problem from the target allocation problem. As a tangible solution to the allocation problem, we use a clustering-based technique that incorporates temporal uncertainty in the cardinality and position of the robots. Finally, we implement the proposed techniques on our multi-quadcopter platforms.