 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapping of Sparse 3D Data using Alternating Projection
Oct 09, 2020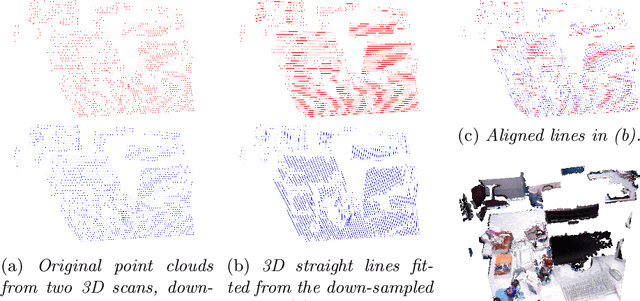



We propose a novel technique to register sparse 3D scans in the absence of texture. While existing methods such as KinectFusion or Iterative Closest Points (ICP) heavily rely on dense point clouds, this task is particularly challenging under sparse conditions without RGB data. Sparse texture-less data does not come with high-quality boundary signal, and this prohibits the use of correspondences from corners, junctions, or boundary lines. Moreover, in the case of sparse data, it is incorrect to assume that the same point will be captured in two consecutive scans. We take a different approach and first re-parameterize the point-cloud using a large number of line segments. In this re-parameterized data, there exists a large number of line intersection (and not correspondence) constraints that allow us to solve the registration task. We propose the use of a two-step alternating projection algorithm by formulating the registration as the simultaneous satisfaction of intersection and rigidity constraints. The proposed approach outperforms other top-scoring algorithms on both Kinect and LiDAR datasets. In Kinect, we can use 100X downsampled sparse data and still outperform competing methods operating on full-resolution data.
Can generalised relative pose estimation solve sparse 3D registration?
Jun 13, 2019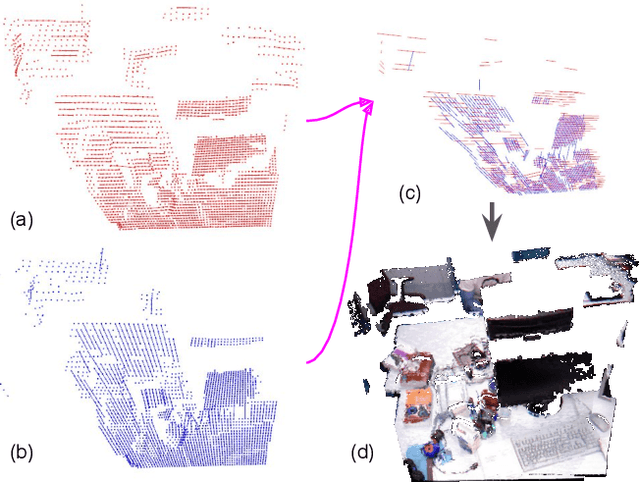

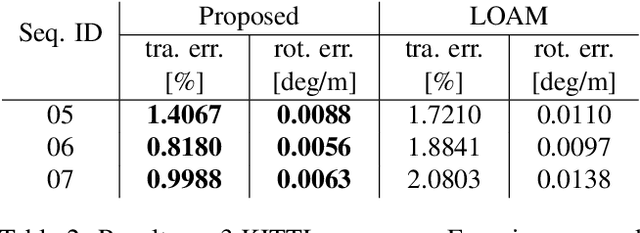
Popular 3D scan registration projects, such as Stanford digital Michelangelo or KinectFusion, exploit the high-resolution sensor data for scan alignment. It is particularly challenging to solve the registration of sparse 3D scans in the absence of RGB components. In this case, we can not establish point correspondences since the same 3D point cannot be captured in two successive scans. In contrast to correspondence based methods, we take a different viewpoint and formulate the sparse 3D registration problem based on the constraints from the intersection of line segments from adjacent scans. We obtain the line segments by modeling every horizontal and vertical scan-line as piece-wise linear segments. We propose a new alternating projection algorithm for solving the scan alignment problem using line intersection constraints. We develop two new minimal solvers for scan alignment in the presence of plane correspondences: 1) 3 line intersections and 1 plane correspondence, and 2) 1 line intersection and 2 plane correspondences. We outperform other competing methods on Kinect and LiDAR datasets.