 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Viewing Graph Optimization for Simultaneous Position and Rotation Registration
Aug 29, 2021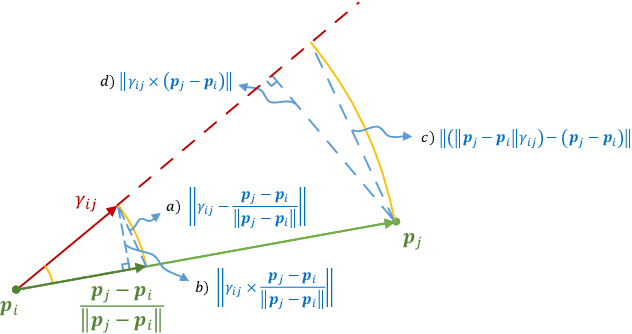


A viewing graph is a set of unknown camera poses, as the vertices, and the observed relative motions, as the edges. Solving the viewing graph is an essential step in a Structure-from-Motion procedure, where a set of relative motions is obtained from a collection of 2D images. Almost all methods in the literature solve for the rotations separately, through rotation averaging process, and use them for solving the positions. Obtaining positions is the challenging part because the translation observations only tell the direction of the motions. It becomes more challenging when the set of edges comprises pairwise translation observations between either near and far cameras. In this paper an iterative method is proposed that overcomes these issues. Also a method is proposed which obtains the rotations and positions simultaneously. Experimental results show the-state-of-the-art performance of the proposed methods.
Optimal Triangulation Method is Not Really Optimal
Jul 09, 2021



Triangulation refers to the problem of finding a 3D point from its 2D projections on multiple camera images. For solving this problem, it is the common practice to use so-called optimal triangulation method, which we call the L2 method in this paper. But, the method can be optimal only if we assume no uncertainty in the camera parameters. Through extensive comparison on synthetic and real data, we observed that the L2 method is actually not the best choice when there is uncertainty in the camera parameters. Interestingly, it can be observed that the simple mid-point method outperforms other methods. Apart from its high performance, the mid-point method has a simple closed formed solution for multiple camera images while the L2 method is hard to be used for more than two camera images. Therefore, in contrast to the common practice, we argue that the simple mid-point method should be used in structure-from-motion applications where there is uncertainty in camera parameters.