 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR ICPS-net: Indoor Camera Positioning based-on Generative Adversarial Network for RGB to Point-Cloud Translation
Nov 14, 2019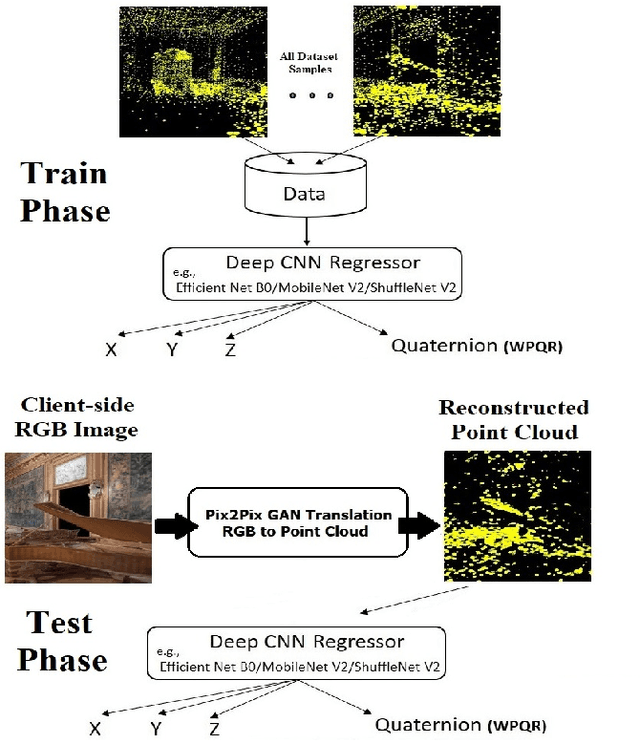
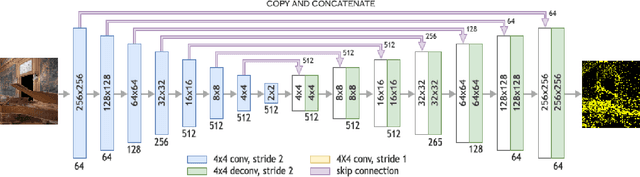
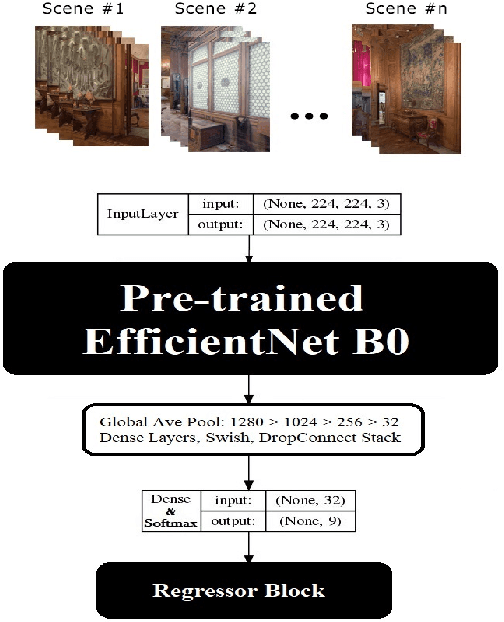
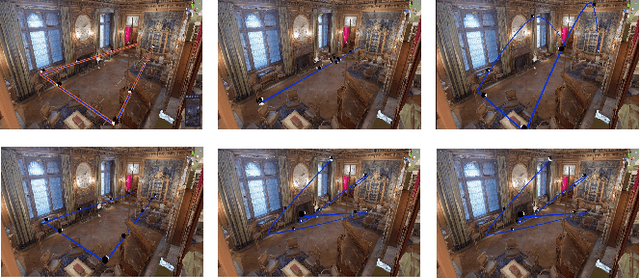
Indoor positioning aims at navigation inside areas with no GPS-data availability and could be employed in many applications such as augmented reality, autonomous driving specially inside closed areas and tunnels. In this paper, a deep neural network-based architecture has been proposed to address this problem. In this regard, a tandem set of convolutional neural networks, as well as a Pix2Pix GAN network have been leveraged to perform as the scene classifier, scene RGB image to point cloud converter, and position regressor, respectively. The proposed architecture outperforms the previous works, including our recent work, in the sense that it makes data generation task easier and more robust against scene small variations, whilst the accuracy of the positioning is remarkably well, for both Cartesian position and quaternion information of the camera.