 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Shadow Detection from a Single Image Using a Patched Convolutional Neural Network
Mar 16, 2018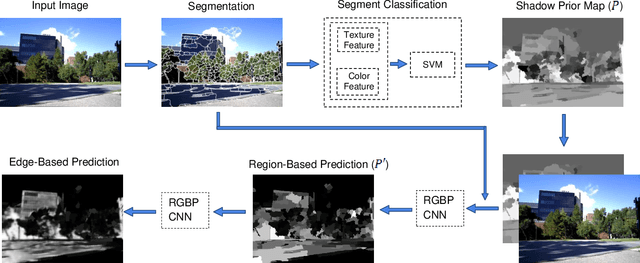
In recent years, various shadow detection methods from a single image have been proposed and used in vision systems; however, most of them are not appropriate for the robotic applications due to the expensive time complexity. This paper introduces a fast shadow detection method using a deep learning framework, with a time cost that is appropriate for robotic applications. In our solution, we first obtain a shadow prior map with the help of multi-class support vector machine using statistical features. Then, we use a semantic- aware patch-level Convolutional Neural Network that efficiently trains on shadow examples by combining the original image and the shadow prior map. Experiments on benchmark datasets demonstrate the proposed method significantly decreases the time complexity of shadow detection, by one or two orders of magnitude compared with state-of-the-art methods, without losing accuracy.