 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePnPXAI: A Universal XAI Framework Providing Automatic Explanations Across Diverse Modalities and Models
May 15, 2025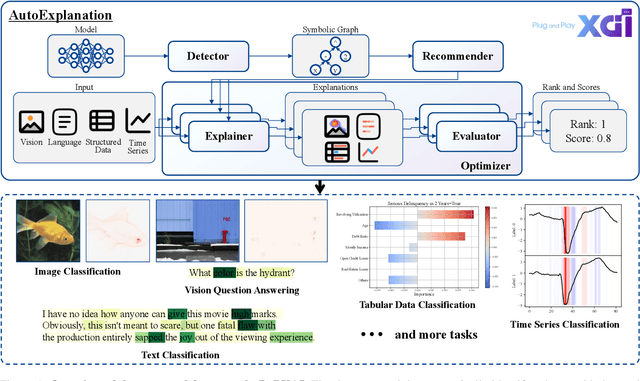
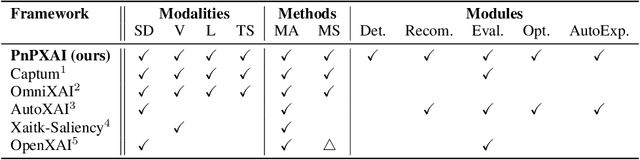

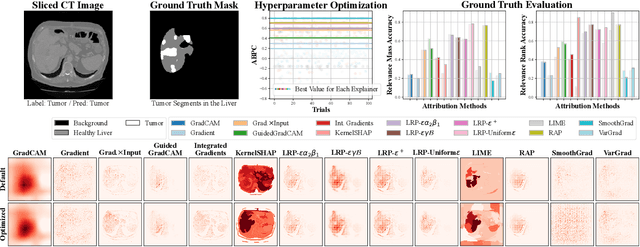
Recently, post hoc explanation methods have emerged to enhance model transparency by attributing model outputs to input features. However, these methods face challenges due to their specificity to certain neural network architectures and data modalities. Existing explainable artificial intelligence (XAI) frameworks have attempted to address these challenges but suffer from several limitations. These include limited flexibility to diverse model architectures and data modalities due to hard-coded implementations, a restricted number of supported XAI methods because of the requirements for layer-specific operations of attribution methods, and sub-optimal recommendations of explanations due to the lack of evaluation and optimization phases. Consequently, these limitations impede the adoption of XAI technology in real-world applications, making it difficult for practitioners to select the optimal explanation method for their domain. To address these limitations, we introduce \textbf{PnPXAI}, a universal XAI framework that supports diverse data modalities and neural network models in a Plug-and-Play (PnP) manner. PnPXAI automatically detects model architectures, recommends applicable explanation methods, and optimizes hyperparameters for optimal explanations. We validate the framework's effectiveness through user surveys and showcase its versatility across various domains, including medicine and finance.
Explaining the Decisions of Deep Policy Networks for Robotic Manipulations
Oct 30, 2023Deep policy networks enable robots to learn behaviors to solve various real-world complex tasks in an end-to-end fashion. However, they lack transparency to provide the reasons of actions. Thus, such a black-box model often results in low reliability and disruptive actions during the deployment of the robot in practice. To enhance its transparency, it is important to explain robot behaviors by considering the extent to which each input feature contributes to determining a given action. In this paper, we present an explicit analysis of deep policy models through input attribution methods to explain how and to what extent each input feature affects the decisions of the robot policy models. To this end, we present two methods for applying input attribution methods to robot policy networks: (1) we measure the importance factor of each joint torque to reflect the influence of the motor torque on the end-effector movement, and (2) we modify a relevance propagation method to handle negative inputs and outputs in deep policy networks properly. To the best of our knowledge, this is the first report to identify the dynamic changes of input attributions of multi-modal sensor inputs in deep policy networks online for robotic manipulation.
Refining Diffusion Planner for Reliable Behavior Synthesis by Automatic Detection of Infeasible Plans
Oct 30, 2023Diffusion-based planning has shown promising results in long-horizon, sparse-reward tasks by training trajectory diffusion models and conditioning the sampled trajectories using auxiliary guidance functions. However, due to their nature as generative models, diffusion models are not guaranteed to generate feasible plans, resulting in failed execution and precluding planners from being useful in safety-critical applications. In this work, we propose a novel approach to refine unreliable plans generated by diffusion models by providing refining guidance to error-prone plans. To this end, we suggest a new metric named restoration gap for evaluating the quality of individual plans generated by the diffusion model. A restoration gap is estimated by a gap predictor which produces restoration gap guidance to refine a diffusion planner. We additionally present an attribution map regularizer to prevent adversarial refining guidance that could be generated from the sub-optimal gap predictor, which enables further refinement of infeasible plans. We demonstrate the effectiveness of our approach on three different benchmarks in offline control settings that require long-horizon planning. We also illustrate that our approach presents explainability by presenting the attribution maps of the gap predictor and highlighting error-prone transitions, allowing for a deeper understanding of the generated plans.
Variational Curriculum Reinforcement Learning for Unsupervised Discovery of Skills
Oct 30, 2023Mutual information-based reinforcement learning (RL) has been proposed as a promising framework for retrieving complex skills autonomously without a task-oriented reward function through mutual information (MI) maximization or variational empowerment. However, learning complex skills is still challenging, due to the fact that the order of training skills can largely affect sample efficiency. Inspired by this, we recast variational empowerment as curriculum learning in goal-conditioned RL with an intrinsic reward function, which we name Variational Curriculum RL (VCRL). From this perspective, we propose a novel approach to unsupervised skill discovery based on information theory, called Value Uncertainty Variational Curriculum (VUVC). We prove that, under regularity conditions, VUVC accelerates the increase of entropy in the visited states compared to the uniform curriculum. We validate the effectiveness of our approach on complex navigation and robotic manipulation tasks in terms of sample efficiency and state coverage speed. We also demonstrate that the skills discovered by our method successfully complete a real-world robot navigation task in a zero-shot setup and that incorporating these skills with a global planner further increases the performance.
Adaptive and Explainable Deployment of Navigation Skills via Hierarchical Deep Reinforcement Learning
May 31, 2023For robotic vehicles to navigate robustly and safely in unseen environments, it is crucial to decide the most suitable navigation policy. However, most existing deep reinforcement learning based navigation policies are trained with a hand-engineered curriculum and reward function which are difficult to be deployed in a wide range of real-world scenarios. In this paper, we propose a framework to learn a family of low-level navigation policies and a high-level policy for deploying them. The main idea is that, instead of learning a single navigation policy with a fixed reward function, we simultaneously learn a family of policies that exhibit different behaviors with a wide range of reward functions. We then train the high-level policy which adaptively deploys the most suitable navigation skill. We evaluate our approach in simulation and the real world and demonstrate that our method can learn diverse navigation skills and adaptively deploy them. We also illustrate that our proposed hierarchical learning framework presents explainability by providing semantics for the behavior of an autonomous agent.