 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo-step Planning of Dynamic UAV Trajectories using Iterative $δ$-Spaces
May 04, 2022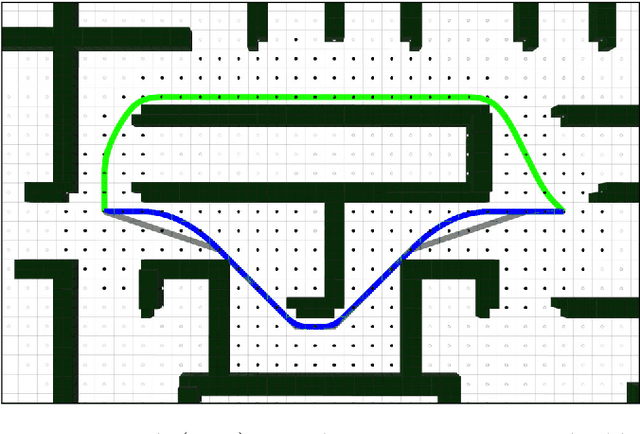
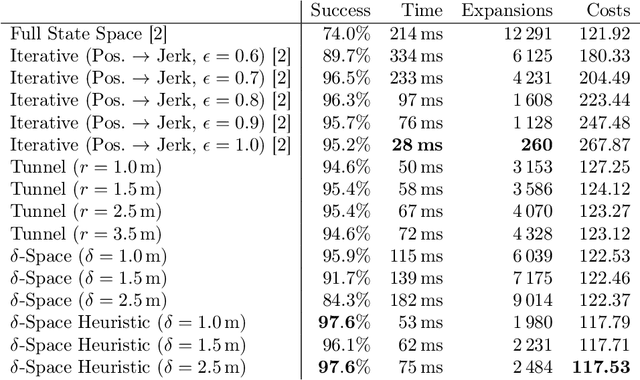

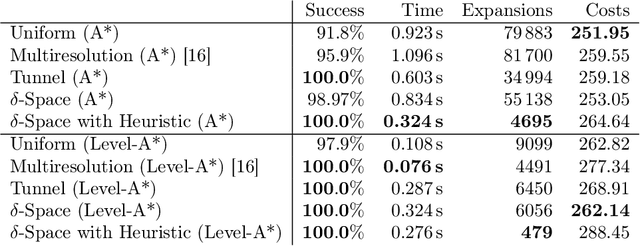
UAV trajectory planning is often done in a two-step approach, where a low-dimensional path is refined to a dynamic trajectory. The resulting trajectories are only locally optimal, however. On the other hand, direct planning in higher-dimensional state spaces generates globally optimal solutions but is time-consuming and thus infeasible for time-constrained applications. To address this issue, we propose $\delta$-Spaces, a pruned high-dimensional state space representation for trajectory refinement. It does not only contain the area around a single lower-dimensional path but consists of the union of multiple near-optimal paths. Thus, it is less prone to local minima. Furthermore, we propose an anytime algorithm using $\delta$-Spaces of increasing sizes. We compare our method against state-of-the-art search-based trajectory planning methods and evaluate it in 2D and 3D environments to generate second-order and third-order UAV trajectories.