 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward 6-DOF Autonomous Underwater Vehicle Energy-Aware Position Control based on Deep Reinforcement Learning: Preliminary Results
Feb 25, 2025The use of autonomous underwater vehicles (AUVs) for surveying, mapping, and inspecting unexplored underwater areas plays a crucial role, where maneuverability and power efficiency are key factors for extending the use of these platforms, making six degrees of freedom (6-DOF) holonomic platforms essential tools. Although Proportional-Integral-Derivative (PID) and Model Predictive Control controllers are widely used in these applications, they often require accurate system knowledge, struggle with repeatability when facing payload or configuration changes, and can be time-consuming to fine-tune. While more advanced methods based on Deep Reinforcement Learning (DRL) have been proposed, they are typically limited to operating in fewer degrees of freedom. This paper proposes a novel DRL-based approach for controlling holonomic 6-DOF AUVs using the Truncated Quantile Critics (TQC) algorithm, which does not require manual tuning and directly feeds commands to the thrusters without prior knowledge of their configuration. Furthermore, it incorporates power consumption directly into the reward function. Simulation results show that the TQC High-Performance method achieves better performance to a fine-tuned PID controller when reaching a goal point, while the TQC Energy-Aware method demonstrates slightly lower performance but consumes 30% less power on average.
Full Magnetometer and Gyroscope Bias Estimation using Angular Rates: Theory and Experimental Evaluation of a Factor Graph-Based Approach
Dec 12, 2024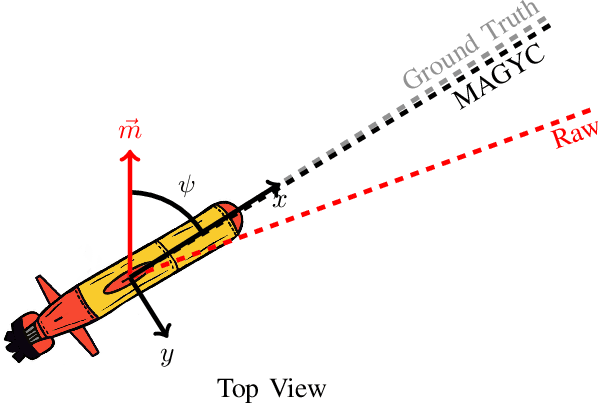



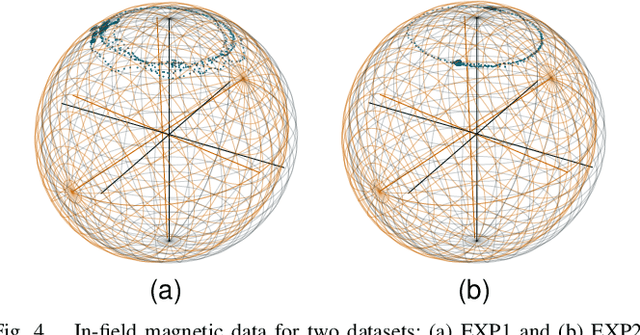
Despite their widespread use in determining system attitude, Micro-Electro-Mechanical Systems (MEMS) Attitude and Heading Reference Systems (AHRS) are limited by sensor measurement biases. This paper introduces a method called MAgnetometer and GYroscope Calibration (MAGYC), leveraging three-axis angular rate measurements from an angular rate gyroscope to estimate both the hard- and soft-iron biases of magnetometers as well as the bias of gyroscopes. We present two implementation methods of this approach based on batch and online incremental factor graphs. Our method imposes fewer restrictions on instrument movements required for calibration, eliminates the need for knowledge of the local magnetic field magnitude or instrument's attitude, and facilitates integration into factor graph algorithms for Smoothing and Mapping frameworks. We validate the proposed methods through numerical simulations and in-field experimental evaluations with a sensor onboard an underwater vehicle. By implementing the proposed method in field data of a seafloor mapping dive, the dead reckoning-based position estimation error of the underwater vehicle was reduced from 10% to 0.5% of the distance traveled.
Towards a Factor Graph-Based Method using Angular Rates for Full Magnetometer Calibration and Gyroscope Bias Estimation
Oct 17, 2024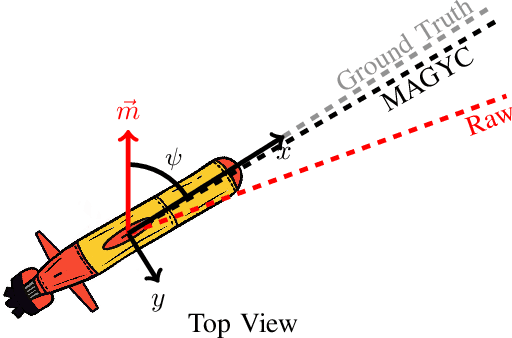
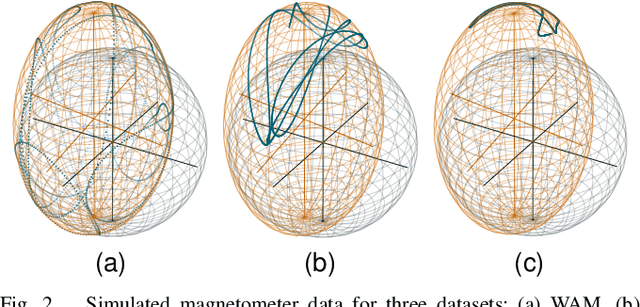
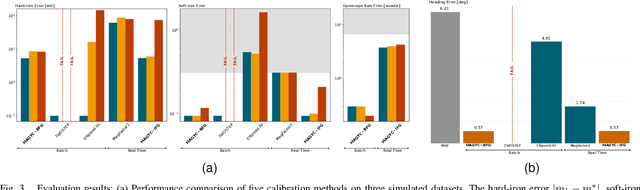
MEMS Attitude Heading Reference Systems are widely employed to determine a system's attitude, but sensor measurement biases limit their accuracy. This paper introduces a novel factor graph-based method called MAgnetometer and GYroscope Calibration (MAGYC). MAGYC leverages three-axis angular rate measurements from an angular rate gyroscope to enhance calibration for batch and online applications. Our approach imposes less restrictive conditions for instrument movements required for calibration, eliminates the need for knowledge of the local magnetic field or instrument attitude, and facilitates integration into factor graph algorithms within Smoothing and Mapping frameworks. We evaluate the proposed methods through numerical simulations and in-field experimental assessments using a sensor installed on an underwater vehicle. Ultimately, our proposed methods reduced the underwater vehicle's heading error standard deviation from 6.21 to 0.57 degrees for a standard seafloor mapping survey.