 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-Shot Reinforcement Learning Under Partial Observability
Jun 18, 2025Recent work has shown that, under certain assumptions, zero-shot reinforcement learning (RL) methods can generalise to any unseen task in an environment after reward-free pre-training. Access to Markov states is one such assumption, yet, in many real-world applications, the Markov state is only partially observable. Here, we explore how the performance of standard zero-shot RL methods degrades when subjected to partially observability, and show that, as in single-task RL, memory-based architectures are an effective remedy. We evaluate our memory-based zero-shot RL methods in domains where the states, rewards and a change in dynamics are partially observed, and show improved performance over memory-free baselines. Our code is open-sourced via: https://enjeeneer.io/projects/bfms-with-memory/.
Conservative World Models
Sep 26, 2023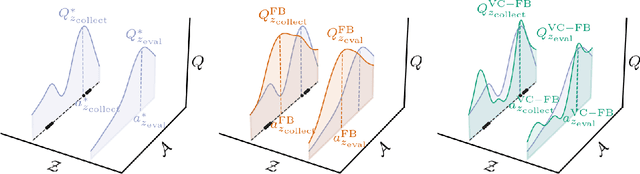
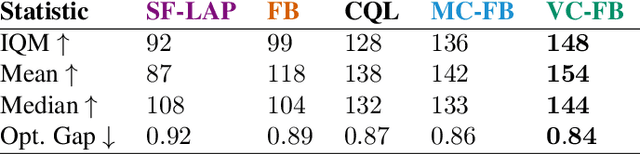
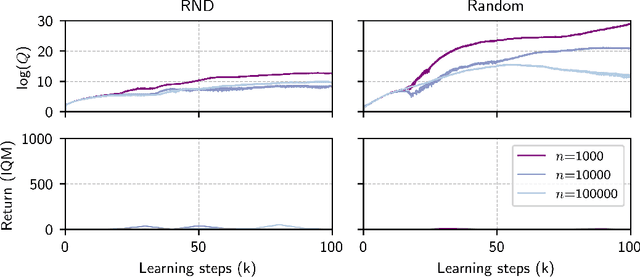

Zero-shot reinforcement learning (RL) promises to provide agents that can perform any task in an environment after an offline pre-training phase. Forward-backward (FB) representations represent remarkable progress towards this ideal, achieving 85% of the performance of task-specific agents in this setting. However, such performance is contingent on access to large and diverse datasets for pre-training, which cannot be expected for most real problems. Here, we explore how FB performance degrades when trained on small datasets that lack diversity, and mitigate it with conservatism, a well-established feature of performant offline RL algorithms. We evaluate our family of methods across various datasets, domains and tasks, reaching 150% of vanilla FB performance in aggregate. Somewhat surprisingly, conservative FB algorithms also outperform the task-specific baseline, despite lacking access to reward labels and being required to maintain policies for all tasks. Conservative FB algorithms perform no worse than FB on full datasets, and so present little downside over their predecessor. Our code is available open-source via https://enjeeneer.io/projects/conservative-world-models/.