 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning for Two-Sided Matching
Jul 07, 2021


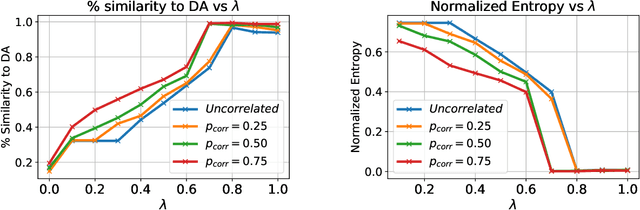
We initiate the use of a multi-layer neural network to model two-sided matching and to explore the design space between strategy-proofness and stability. It is well known that both properties cannot be achieved simultaneously but the efficient frontier in this design space is not understood. We show empirically that it is possible to achieve a good compromise between stability and strategy-proofness-substantially better than that achievable through a convex combination of deferred acceptance (stable and strategy-proof for only one side of the market) and randomized serial dictatorship (strategy-proof but not stable).
Universal Reconfiguration of (Hyper-)cubic Robots
Dec 30, 2011

We study a simple reconfigurable robot model which has not been previously examined: cubic robots comprised of three-dimensional cubic modules which can slide across each other and rotate about each others' edges. We demonstrate that the cubic robot model is universal, i.e., that an n-module cubic robot can reconfigure itself into any specified n-module configuration. Additionally, we provide an algorithm that efficiently plans and executes cubic robot motion. Our results directly extend to a d-dimensional model.