 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Robust Methods for Singular State-Space Models
Jun 28, 2018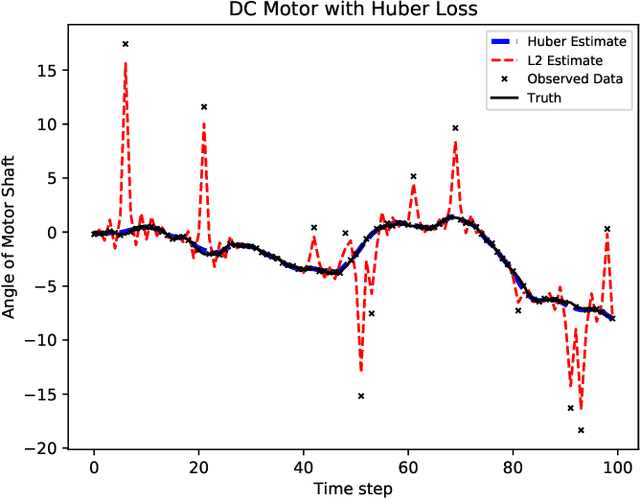
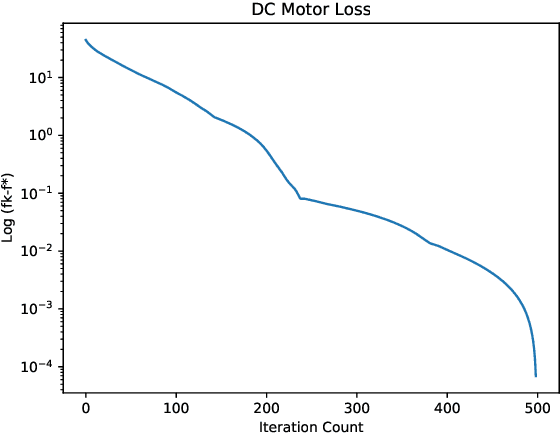
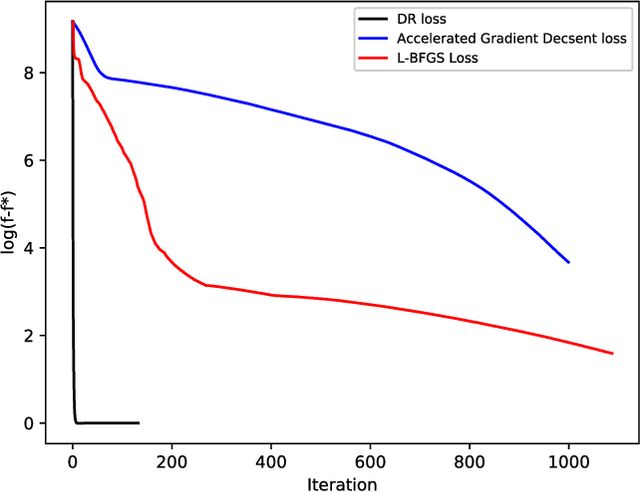
State-space models are used in a wide range of time series analysis formulations. Kalman filtering and smoothing are work-horse algorithms in these settings. While classic algorithms assume Gaussian errors to simplify estimation, recent advances use a broader range of optimization formulations to allow outlier-robust estimation, as well as constraints to capture prior information. Here we develop methods on state-space models where either innovations or error covariances may be singular. These models frequently arise in navigation (e.g. for `colored noise' models or deterministic integrals) and are ubiquitous in auto-correlated time series models such as ARMA. We reformulate all state-space models (singular as well as nonsinguar) as constrained convex optimization problems, and develop an efficient algorithm for this reformulation. The convergence rate is {\it locally linear}, with constants that do not depend on the conditioning of the problem. Numerical comparisons show that the new approach outperforms competing approaches for {\it nonsingular} models, including state of the art interior point (IP) methods. IP methods converge at superlinear rates; we expect them to dominate. However, the steep rate of the proposed approach (independent of problem conditioning) combined with cheap iterations wins against IP in a run-time comparison. We therefore suggest that the proposed approach be the {\it default choice} for estimating state space models outside of the Gaussian context, regardless of whether the error covariances are singular or not.