 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterative Path Reconstruction for Large-Scale Inertial Navigation on Smartphones
Jun 02, 2019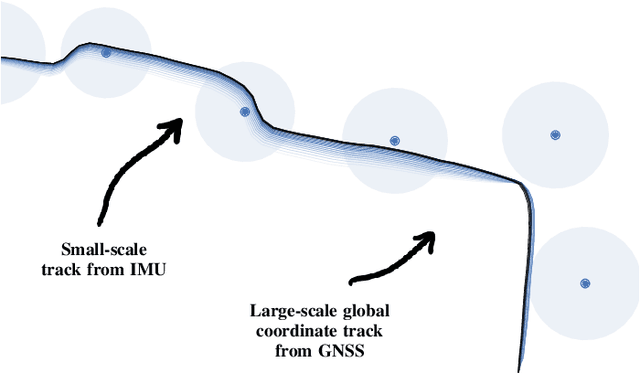
Modern smartphones have all the sensing capabilities required for accurate and robust navigation and tracking. In specific environments some data streams may be absent, less reliable, or flat out wrong. In particular, the GNSS signal can become flawed or silent inside buildings or in streets with tall buildings. In this application paper, we aim to advance the current state-of-the-art in motion estimation using inertial measurements in combination with partial GNSS data on standard smartphones. We show how iterative estimation methods help refine the positioning path estimates in retrospective use cases that can cover both fixed-interval and fixed-lag scenarios. We compare estimation results provided by global iterated Kalman filtering methods to those of a visual-inertial tracking scheme (Apple ARKit). The practical applicability is demonstrated on real-world use cases on empirical data acquired from both smartphones and tablet devices.
Robust Gyroscope-Aided Camera Self-Calibration
May 31, 2018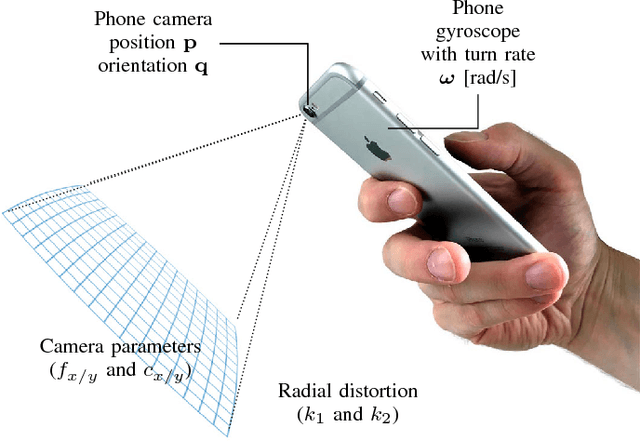
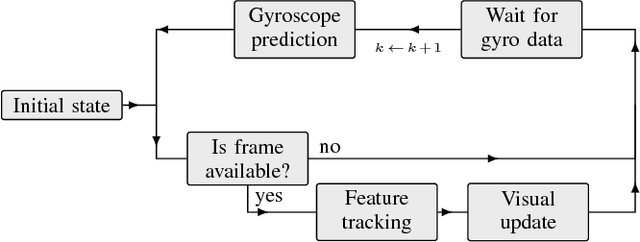
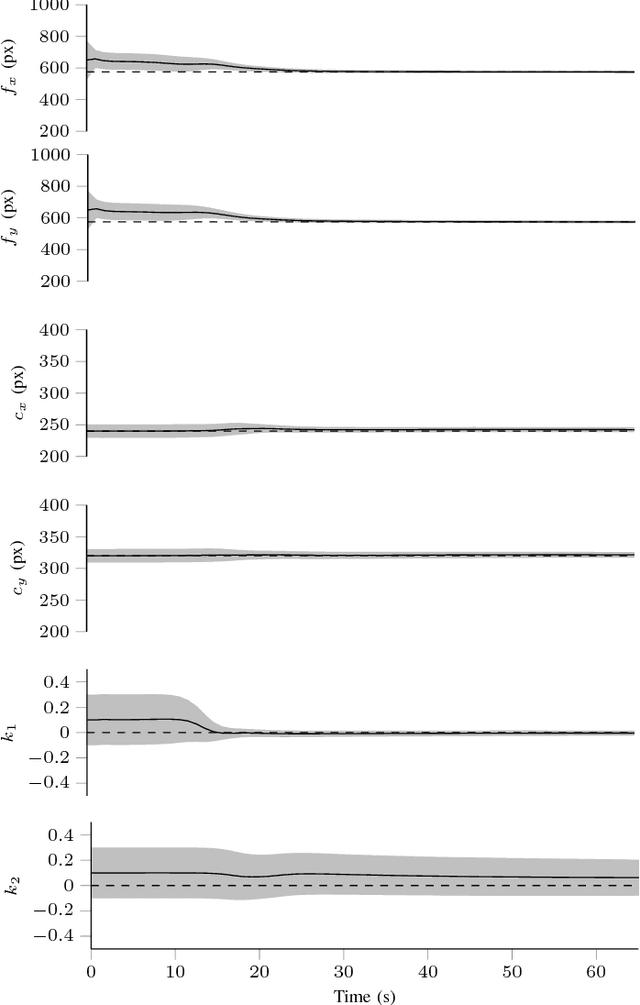
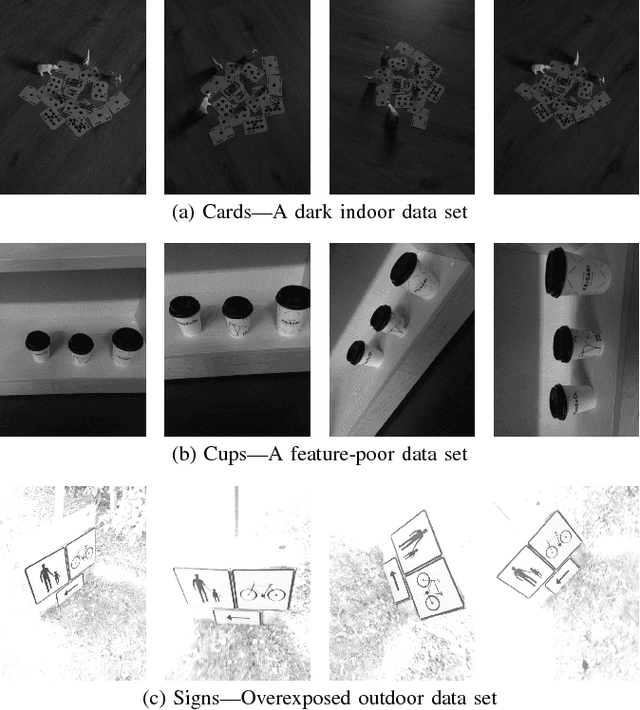
Camera calibration for estimating the intrinsic parameters and lens distortion is a prerequisite for various monocular vision applications including feature tracking and video stabilization. This application paper proposes a model for estimating the parameters on the fly by fusing gyroscope and camera data, both readily available in modern day smartphones. The model is based on joint estimation of visual feature positions, camera parameters, and the camera pose, the movement of which is assumed to follow the movement predicted by the gyroscope. Our model assumes the camera movement to be free, but continuous and differentiable, and individual features are assumed to stay stationary. The estimation is performed online using an extended Kalman filter, and it is shown to outperform existing methods in robustness and insensitivity to initialization. We demonstrate the method using simulated data and empirical data from an iPad.