 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Segmentation of Surface from Lidar Point Cloud
Sep 13, 2020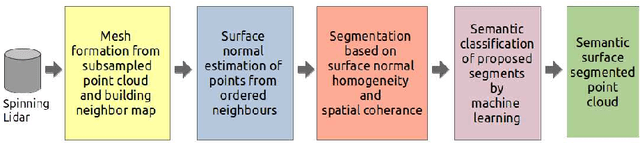
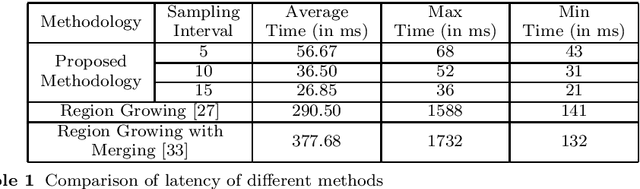
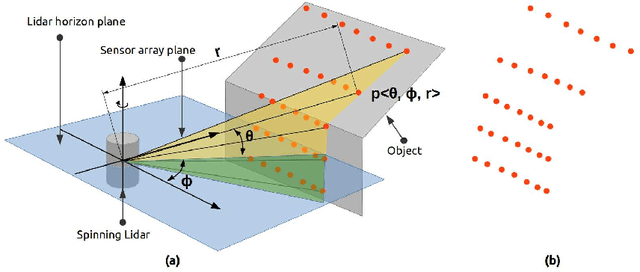
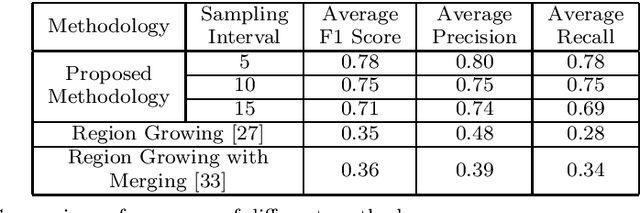
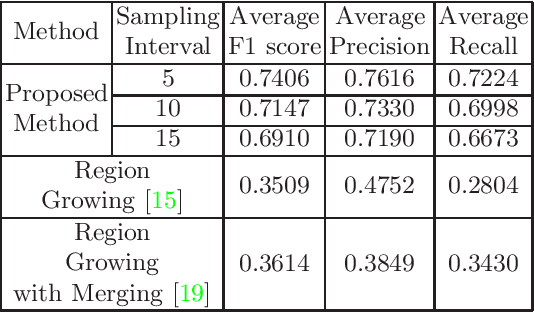
In the field of SLAM (Simultaneous Localization And Mapping) for robot navigation, mapping the environment is an important task. In this regard the Lidar sensor can produce near accurate 3D map of the environment in the format of point cloud, in real time. Though the data is adequate for extracting information related to SLAM, processing millions of points in the point cloud is computationally quite expensive. The methodology presented proposes a fast algorithm that can be used to extract semantically labelled surface segments from the cloud, in real time, for direct navigational use or higher level contextual scene reconstruction. First, a single scan from a spinning Lidar is used to generate a mesh of subsampled cloud points online. The generated mesh is further used for surface normal computation of those points on the basis of which surface segments are estimated. A novel descriptor to represent the surface segments is proposed and utilized to determine the surface class of the segments (semantic label) with the help of classifier. These semantic surface segments can be further utilized for geometric reconstruction of objects in the scene, or can be used for optimized trajectory planning by a robot. The proposed methodology is compared with number of point cloud segmentation methods and state of the art semantic segmentation methods to emphasize its efficacy in terms of speed and accuracy.
Fast Geometric Surface based Segmentation of Point Cloud from Lidar Data
May 06, 2020
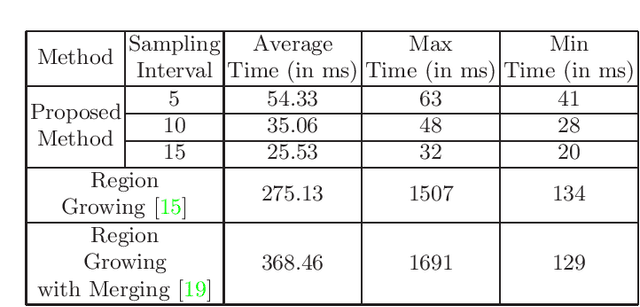
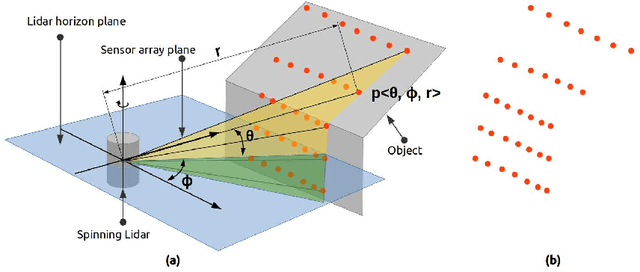
Mapping the environment has been an important task for robot navigation and Simultaneous Localization And Mapping (SLAM). LIDAR provides a fast and accurate 3D point cloud map of the environment which helps in map building. However, processing millions of points in the point cloud becomes a computationally expensive task. In this paper, a methodology is presented to generate the segmented surfaces in real time and these can be used in modeling the 3D objects. At first an algorithm is proposed for efficient map building from single shot data of spinning Lidar. It is based on fast meshing and sub-sampling. It exploits the physical design and the working principle of the spinning Lidar sensor. The generated mesh surfaces are then segmented by estimating the normal and considering their homogeneity. The segmented surfaces can be used as proposals for predicting geometrically accurate model of objects in the robots activity environment. The proposed methodology is compared with some popular point cloud segmentation methods to highlight the efficacy in terms of accuracy and speed.
* Accepted to PReMI 2019( Pattern Recognition and Machine Intelligence 2019 )