 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompressing Vision Transformers for Low-Resource Visual Learning
Sep 05, 2023

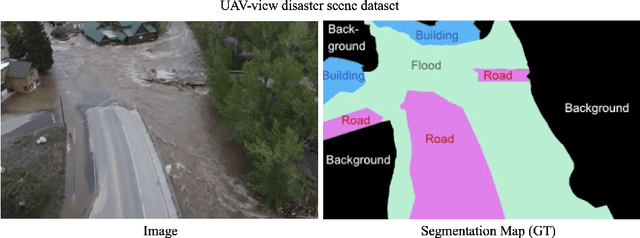

Vision transformer (ViT) and its variants have swept through visual learning leaderboards and offer state-of-the-art accuracy in tasks such as image classification, object detection, and semantic segmentation by attending to different parts of the visual input and capturing long-range spatial dependencies. However, these models are large and computation-heavy. For instance, the recently proposed ViT-B model has 86M parameters making it impractical for deployment on resource-constrained devices. As a result, their deployment on mobile and edge scenarios is limited. In our work, we aim to take a step toward bringing vision transformers to the edge by utilizing popular model compression techniques such as distillation, pruning, and quantization. Our chosen application environment is an unmanned aerial vehicle (UAV) that is battery-powered and memory-constrained, carrying a single-board computer on the scale of an NVIDIA Jetson Nano with 4GB of RAM. On the other hand, the UAV requires high accuracy close to that of state-of-the-art ViTs to ensure safe object avoidance in autonomous navigation, or correct localization of humans in search-and-rescue. Inference latency should also be minimized given the application requirements. Hence, our target is to enable rapid inference of a vision transformer on an NVIDIA Jetson Nano (4GB) with minimal accuracy loss. This allows us to deploy ViTs on resource-constrained devices, opening up new possibilities in surveillance, environmental monitoring, etc. Our implementation is made available at https://github.com/chensy7/efficient-vit.
t-RAIN: Robust generalization under weather-aliasing label shift attacks
May 15, 2023In the classical supervised learning settings, classifiers are fit with the assumption of balanced label distributions and produce remarkable results on the same. In the real world, however, these assumptions often bend and in turn adversely impact model performance. Identifying bad learners in skewed target distributions is even more challenging. Thus achieving model robustness under these "label shift" settings is an important task in autonomous perception. In this paper, we analyze the impact of label shift on the task of multi-weather classification for autonomous vehicles. We use this information as a prior to better assess pedestrian detection in adverse weather. We model the classification performance as an indicator of robustness under 4 label shift scenarios and study the behavior of multiple classes of models. We propose t-RAIN a similarity mapping technique for synthetic data augmentation using large scale generative models and evaluate the performance on DAWN dataset. This mapping boosts model test accuracy by 2.1, 4.4, 1.9, 2.7 % in no-shift, fog, snow, dust shifts respectively. We present state-of-the-art pedestrian detection results on real and synthetic weather domains with best performing 82.69 AP (snow) and 62.31 AP (fog) respectively.