 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompressing Vision Transformers for Low-Resource Visual Learning
Paper and Code


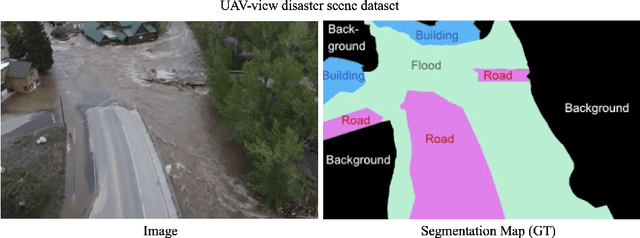

Vision transformer (ViT) and its variants have swept through visual learning leaderboards and offer state-of-the-art accuracy in tasks such as image classification, object detection, and semantic segmentation by attending to different parts of the visual input and capturing long-range spatial dependencies. However, these models are large and computation-heavy. For instance, the recently proposed ViT-B model has 86M parameters making it impractical for deployment on resource-constrained devices. As a result, their deployment on mobile and edge scenarios is limited. In our work, we aim to take a step toward bringing vision transformers to the edge by utilizing popular model compression techniques such as distillation, pruning, and quantization. Our chosen application environment is an unmanned aerial vehicle (UAV) that is battery-powered and memory-constrained, carrying a single-board computer on the scale of an NVIDIA Jetson Nano with 4GB of RAM. On the other hand, the UAV requires high accuracy close to that of state-of-the-art ViTs to ensure safe object avoidance in autonomous navigation, or correct localization of humans in search-and-rescue. Inference latency should also be minimized given the application requirements. Hence, our target is to enable rapid inference of a vision transformer on an NVIDIA Jetson Nano (4GB) with minimal accuracy loss. This allows us to deploy ViTs on resource-constrained devices, opening up new possibilities in surveillance, environmental monitoring, etc. Our implementation is made available at https://github.com/chensy7/efficient-vit.