 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplaining the Unseen: Multimodal Vision-Language Reasoning for Situational Awareness in Underground Mining Disasters
Dec 09, 2025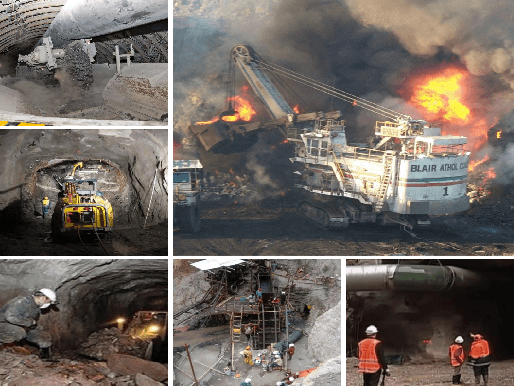
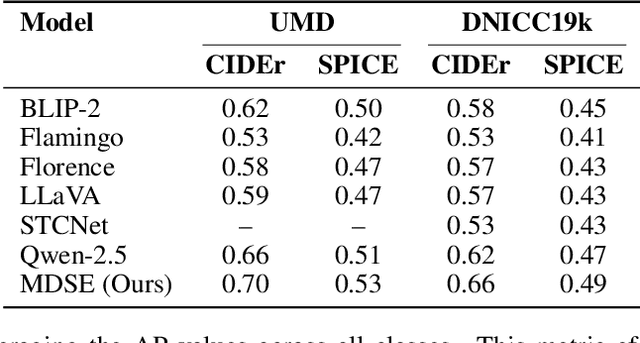
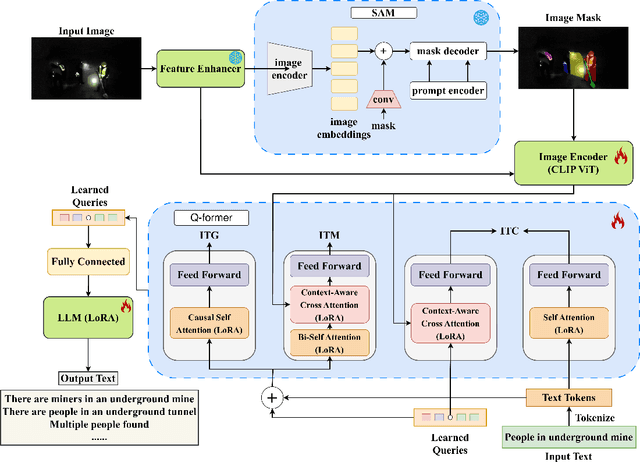
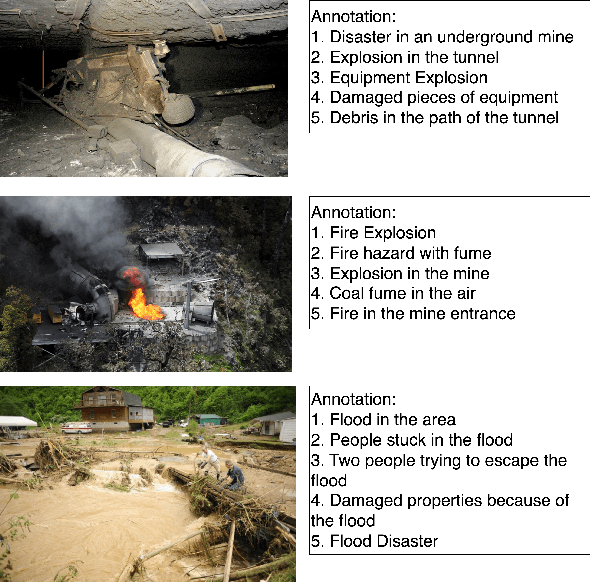
Underground mining disasters produce pervasive darkness, dust, and collapses that obscure vision and make situational awareness difficult for humans and conventional systems. To address this, we propose MDSE, Multimodal Disaster Situation Explainer, a novel vision-language framework that automatically generates detailed textual explanations of post-disaster underground scenes. MDSE has three-fold innovations: (i) Context-Aware Cross-Attention for robust alignment of visual and textual features even under severe degradation; (ii) Segmentation-aware dual pathway visual encoding that fuses global and region-specific embeddings; and (iii) Resource-Efficient Transformer-Based Language Model for expressive caption generation with minimal compute cost. To support this task, we present the Underground Mine Disaster (UMD) dataset--the first image-caption corpus of real underground disaster scenes--enabling rigorous training and evaluation. Extensive experiments on UMD and related benchmarks show that MDSE substantially outperforms state-of-the-art captioning models, producing more accurate and contextually relevant descriptions that capture crucial details in obscured environments, improving situational awareness for underground emergency response. The code is at https://github.com/mizanJewel/Multimodal-Disaster-Situation-Explainer.
DIS-Mine: Instance Segmentation for Disaster-Awareness in Poor-Light Condition in Underground Mines
Nov 20, 2024Detecting disasters in underground mining, such as explosions and structural damage, has been a persistent challenge over the years. This problem is compounded for first responders, who often have no clear information about the extent or nature of the damage within the mine. The poor-light or even total darkness inside the mines makes rescue efforts incredibly difficult, leading to a tragic loss of life. In this paper, we propose a novel instance segmentation method called DIS-Mine, specifically designed to identify disaster-affected areas within underground mines under low-light or poor visibility conditions, aiding first responders in rescue efforts. DIS-Mine is capable of detecting objects in images, even in complete darkness, by addressing challenges such as high noise, color distortions, and reduced contrast. The key innovations of DIS-Mine are built upon four core components: i) Image brightness improvement, ii) Instance segmentation with SAM integration, iii) Mask R-CNN-based segmentation, and iv) Mask alignment with feature matching. On top of that, we have collected real-world images from an experimental underground mine, introducing a new dataset named ImageMine, specifically gathered in low-visibility conditions. This dataset serves to validate the performance of DIS-Mine in realistic, challenging environments. Our comprehensive experiments on the ImageMine dataset, as well as on various other datasets demonstrate that DIS-Mine achieves a superior F1 score of 86.0% and mIoU of 72.0%, outperforming state-of-the-art instance segmentation methods, with at least 15x improvement and up to 80% higher precision in object detection.
CAV-AD: A Robust Framework for Detection of Anomalous Data and Malicious Sensors in CAV Networks
Jul 07, 2024The adoption of connected and automated vehicles (CAVs) has sparked considerable interest across diverse industries, including public transportation, underground mining, and agriculture sectors. However, CAVs' reliance on sensor readings makes them vulnerable to significant threats. Manipulating these readings can compromise CAV network security, posing serious risks for malicious activities. Although several anomaly detection (AD) approaches for CAV networks are proposed, they often fail to: i) detect multiple anomalies in specific sensor(s) with high accuracy or F1 score, and ii) identify the specific sensor being attacked. In response, this paper proposes a novel framework tailored to CAV networks, called CAV-AD, for distinguishing abnormal readings amidst multiple anomaly data while identifying malicious sensors. Specifically, CAV-AD comprises two main components: i) A novel CNN model architecture called optimized omni-scale CNN (O-OS-CNN), which optimally selects the time scale by generating all possible kernel sizes for input time series data; ii) An amplification block to increase the values of anomaly readings, enhancing sensitivity for detecting anomalies. Not only that, but CAV-AD integrates the proposed O-OS-CNN with a Kalman filter to instantly identify the malicious sensors. We extensively train CAV-AD using real-world datasets containing both instant and constant attacks, evaluating its performance in detecting intrusions from multiple anomalies, which presents a more challenging scenario. Our results demonstrate that CAV-AD outperforms state-of-the-art methods, achieving an average accuracy of 98% and an average F1 score of 89\%, while accurately identifying the malicious sensors.