 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRASS: Risk-Aware Swarm Storage
Jan 04, 2022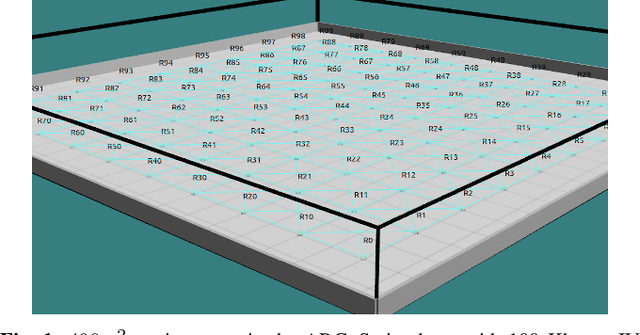
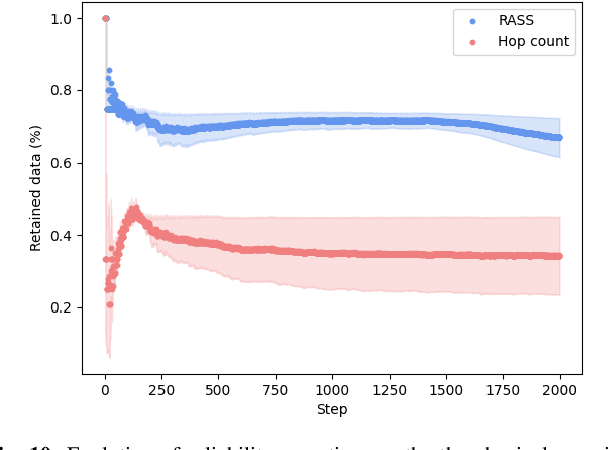
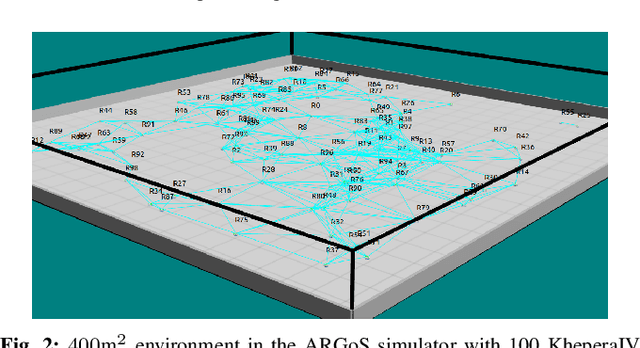
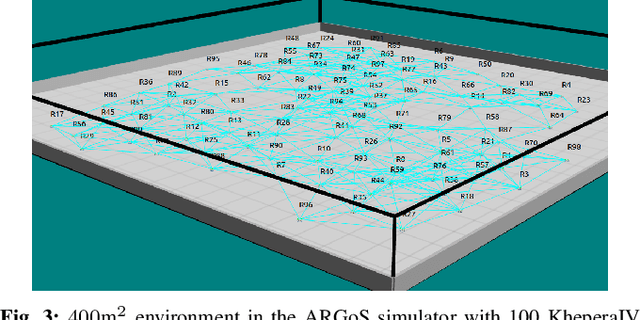
In robotics, data acquisition often plays a key part in unknown environment exploration. For example, storing information about the topography of the explored terrain or the natural dangers in the environment can inform the decision-making process of the robots. Therefore, it is crucial to store these data safely and to make it available quickly to the operators of the robotic system. In a decentralized system like a swarm of robots, this entails several challenges. To address them, we propose RASS, a decentralized risk-aware swarm storage and routing mechanism, which relies exclusively on local information sharing between neighbours to establish storage and routing fitness. We test our system through thorough experiments in a physics-based simulator and test its real-world applicability with physical experiments. We obtain convincing reliability, routing speeds, and swarm storage capacity results.
DORA: Distributed Online Risk-Aware Explorer
Sep 29, 2021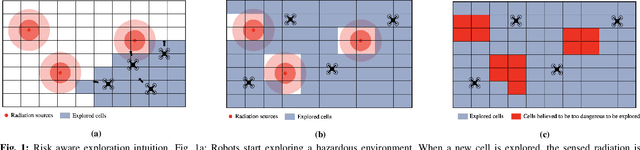
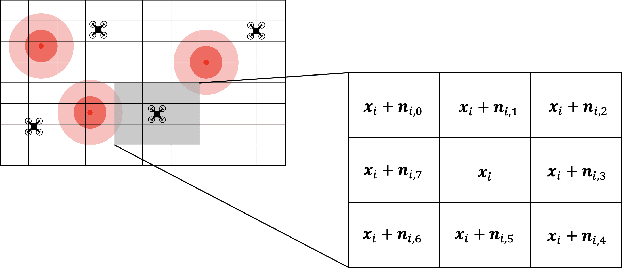
Exploration of unknown environments is an important challenge in the field of robotics. While a single robot can achieve this task alone, evidence suggests it could be accomplished more efficiently by groups of robots, with advantages in terms of terrain coverage as well as robustness to failures. Exploration can be guided through belief maps, which provide probabilistic information about which part of the terrain is interesting to explore (either based on risk management or reward). This process can be centrally coordinated by building a collective belief map on a common server. However, relying on a central processing station creates a communication bottleneck and single point of failure for the system. In this paper, we present Distributed Online Risk-Aware (DORA) Explorer, an exploration system that leverages decentralized information sharing to update a common risk belief map. DORA Explorer allows a group of robots to explore an unknown environment discretized as a 2D grid with obstacles, with high coverage while minimizing exposure to risk, effectively reducing robot failures