 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMovement Coordination in Human-Robot Teams: A Dynamical Systems Approach
May 04, 2016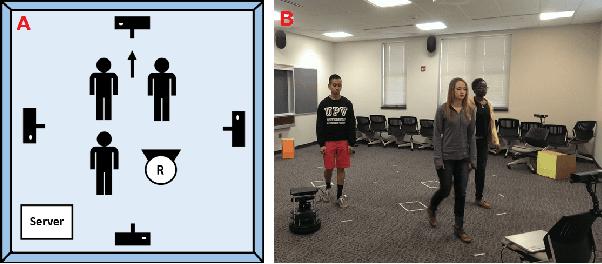

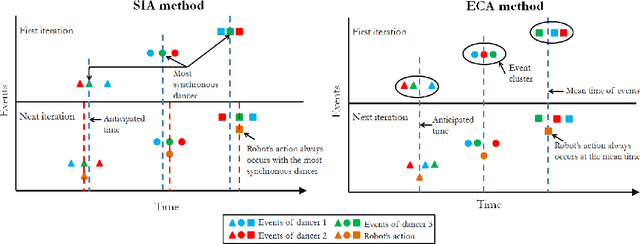
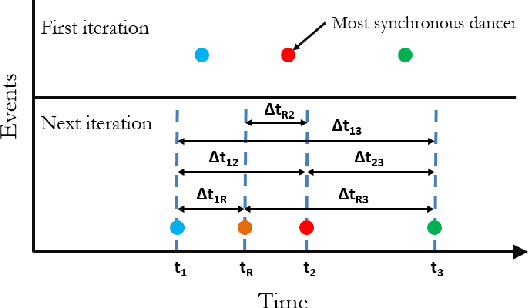
In order to be effective teammates, robots need to be able to understand high-level human behavior to recognize, anticipate, and adapt to human motion. We have designed a new approach to enable robots to perceive human group motion in real-time, anticipate future actions, and synthesize their own motion accordingly. We explore this within the context of joint action, where humans and robots move together synchronously. In this paper, we present an anticipation method which takes high-level group behavior into account. We validate the method within a human-robot interaction scenario, where an autonomous mobile robot observes a team of human dancers, and then successfully and contingently coordinates its movements to "join the dance". We compared the results of our anticipation method to move the robot with another method which did not rely on high-level group behavior, and found our method performed better both in terms of more closely synchronizing the robot's motion to the team, and also exhibiting more contingent and fluent motion. These findings suggest that the robot performs better when it has an understanding of high-level group behavior than when it does not. This work will help enable others in the robotics community to build more fluent and adaptable robots in the future.