 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning, Scheduling, and Behavior in EV Charging Systems: A Critical Survey and Trilemma Framework
May 20, 2026The rapid growth of electric vehicles is shifting the main constraint on transport electrification from vehicle adoption to the deployment and operation of charging infrastructure. Charging-network design requires decisions across three interdependent layers: Planning, which determines where and how much infrastructure to build; Scheduling, which governs charging dispatch, pricing, and grid interaction; and Behavior, which captures how users choose stations, charging times, and charging durations. Existing studies have advanced each layer substantially, but the literature remains fragmented, and cross-layer interactions are often treated through simplifying assumptions. This survey develops a three-layer Planning-Scheduling-Behavior (PSB) framework to organize EV charging research according to decision horizon, actor objective, and coupling structure. We further identify a fidelity-tractability tradeoff, termed the PSB trilemma: each layer is computationally difficult in isolation, and realistic integration across layers generally requires reducing the fidelity of at least one layer. Reviewing the three pairwise-coupling literatures - Planning-Scheduling, Scheduling-Behavior, and Planning-Behavior - we show that the omitted third layer is typically fixed exogenously or represented by a static aggregate surrogate. These simplifications enable tractability but impose distinct costs: they can obscure long-term investment feedback, temporal grid and emissions dynamics, or heterogeneous user response and equity outcomes. Building on this diagnosis, we identify open challenges in emerging charging technologies, behavioral incentives, equity metrics, and city-scale learning-based methods that balance fidelity, interpretability, and policy relevance.
CAMP-HiVe: Cyclic Pair Merging based Efficient DNN Pruning with Hessian-Vector Approximation for Resource-Constrained Systems
Nov 09, 2025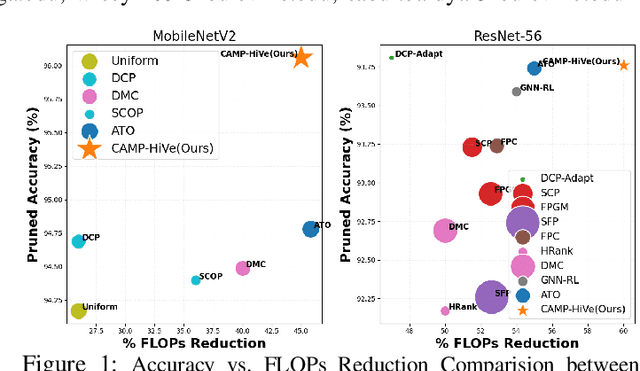
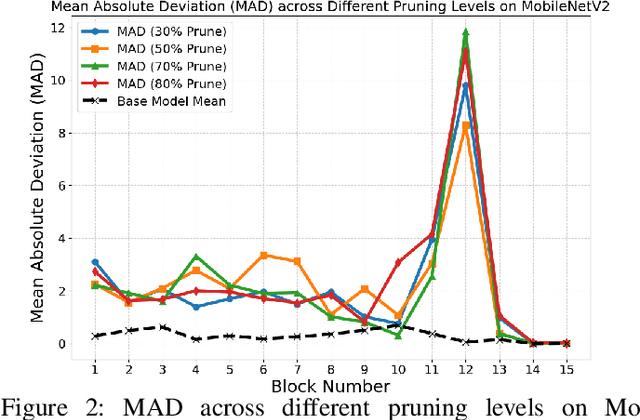
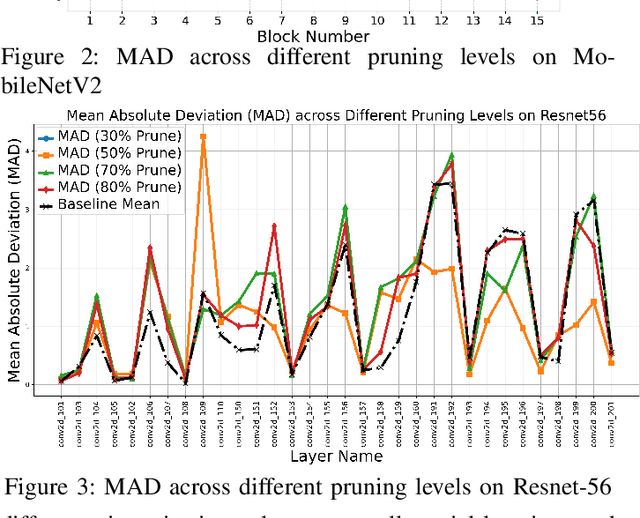
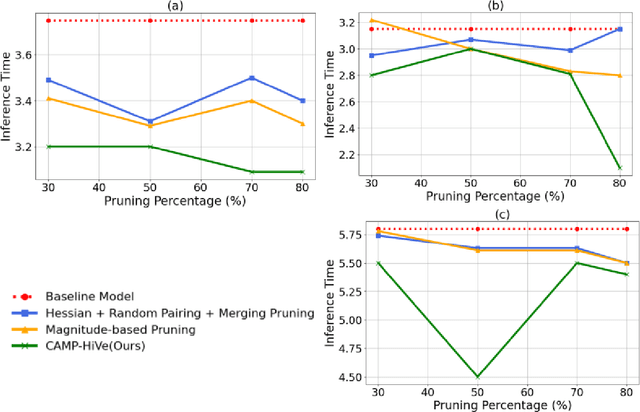
Deep learning algorithms are becoming an essential component of many artificial intelligence (AI) driven applications, many of which run on resource-constrained and energy-constrained systems. For efficient deployment of these algorithms, although different techniques for the compression of neural network models are proposed, neural pruning is one of the fastest and effective methods, which can provide a high compression gain with minimal cost. To harness enhanced performance gain with respect to model complexity, we propose a novel neural network pruning approach utilizing Hessian-vector products that approximate crucial curvature information in the loss function, which significantly reduces the computation demands. By employing a power iteration method, our algorithm effectively identifies and preserves the essential information, ensuring a balanced trade-off between model accuracy and computational efficiency. Herein, we introduce CAMP-HiVe, a cyclic pair merging-based pruning with Hessian Vector approximation by iteratively consolidating weight pairs, combining significant and less significant weights, thus effectively streamlining the model while preserving its performance. This dynamic, adaptive framework allows for real-time adjustment of weight significance, ensuring that only the most critical parameters are retained. Our experimental results demonstrate that our proposed method achieves significant reductions in computational requirements while maintaining high performance across different neural network architectures, e.g., ResNet18, ResNet56, and MobileNetv2, on standard benchmark datasets, e.g., CIFAR10, CIFAR-100, and ImageNet, and it outperforms the existing state-of-the-art neural pruning methods.
Policies over Poses: Reinforcement Learning based Distributed Pose-Graph Optimization for Multi-Robot SLAM
Oct 26, 2025



We consider the distributed pose-graph optimization (PGO) problem, which is fundamental in accurate trajectory estimation in multi-robot simultaneous localization and mapping (SLAM). Conventional iterative approaches linearize a highly non-convex optimization objective, requiring repeated solving of normal equations, which often converge to local minima and thus produce suboptimal estimates. We propose a scalable, outlier-robust distributed planar PGO framework using Multi-Agent Reinforcement Learning (MARL). We cast distributed PGO as a partially observable Markov game defined on local pose-graphs, where each action refines a single edge's pose estimate. A graph partitioner decomposes the global pose graph, and each robot runs a recurrent edge-conditioned Graph Neural Network (GNN) encoder with adaptive edge-gating to denoise noisy edges. Robots sequentially refine poses through a hybrid policy that utilizes prior action memory and graph embeddings. After local graph correction, a consensus scheme reconciles inter-robot disagreements to produce a globally consistent estimate. Our extensive evaluations on a comprehensive suite of synthetic and real-world datasets demonstrate that our learned MARL-based actors reduce the global objective by an average of 37.5% more than the state-of-the-art distributed PGO framework, while enhancing inference efficiency by at least 6X. We also demonstrate that actor replication allows a single learned policy to scale effortlessly to substantially larger robot teams without any retraining. Code is publicly available at https://github.com/herolab-uga/policies-over-poses.
SPACE: 3D Spatial Co-operation and Exploration Framework for Robust Mapping and Coverage with Multi-Robot Systems
Nov 04, 2024



In indoor environments, multi-robot visual (RGB-D) mapping and exploration hold immense potential for application in domains such as domestic service and logistics, where deploying multiple robots in the same environment can significantly enhance efficiency. However, there are two primary challenges: (1) the "ghosting trail" effect, which occurs due to overlapping views of robots impacting the accuracy and quality of point cloud reconstruction, and (2) the oversight of visual reconstructions in selecting the most effective frontiers for exploration. Given these challenges are interrelated, we address them together by proposing a new semi-distributed framework (SPACE) for spatial cooperation in indoor environments that enables enhanced coverage and 3D mapping. SPACE leverages geometric techniques, including "mutual awareness" and a "dynamic robot filter," to overcome spatial mapping constraints. Additionally, we introduce a novel spatial frontier detection system and map merger, integrated with an adaptive frontier assigner for optimal coverage balancing the exploration and reconstruction objectives. In extensive ROS-Gazebo simulations, SPACE demonstrated superior performance over state-of-the-art approaches in both exploration and mapping metrics.