 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCORSAIR: Convolutional Object Retrieval and Symmetry-AIded Registration
Mar 11, 2021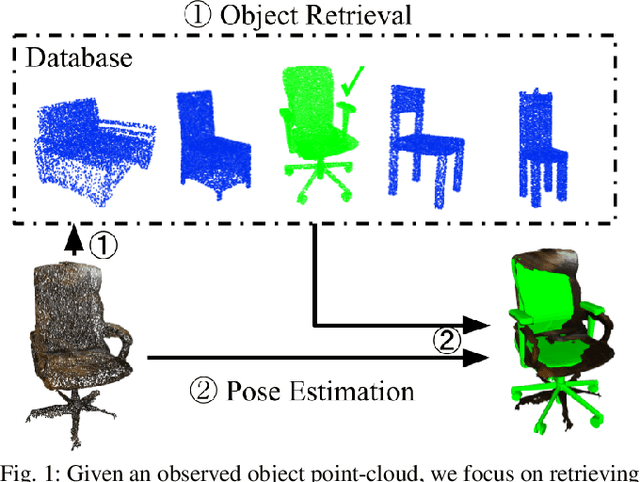
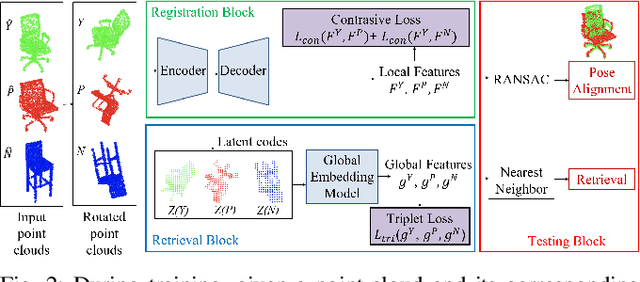
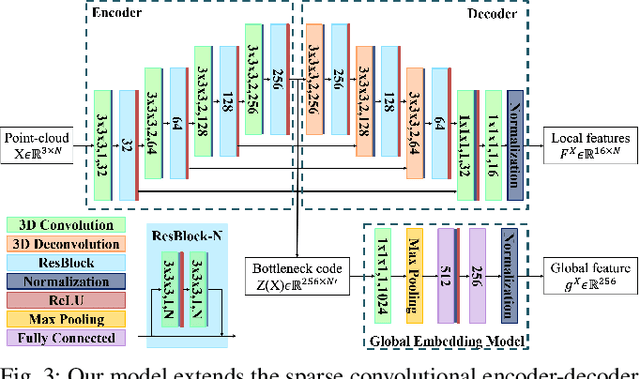
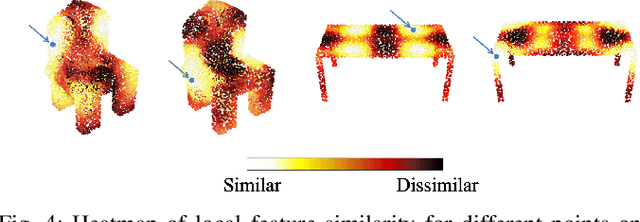
This paper considers online object-level mapping using partial point-cloud observations obtained online in an unknown environment. We develop and approach for fully Convolutional Object Retrieval and Symmetry-AIded Registration (CORSAIR). Our model extends the Fully Convolutional Geometric Features model to learn a global object-shape embedding in addition to local point-wise features from the point-cloud observations. The global feature is used to retrieve a similar object from a category database, and the local features are used for robust pose registration between the observed and the retrieved object. Our formulation also leverages symmetries, present in the object shapes, to obtain promising local-feature pairs from different symmetry classes for matching. We present results from synthetic and real-world datasets with different object categories to verify the robustness of our method.