 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonte Carlo DropBlock for Modelling Uncertainty in Object Detection
Aug 08, 2021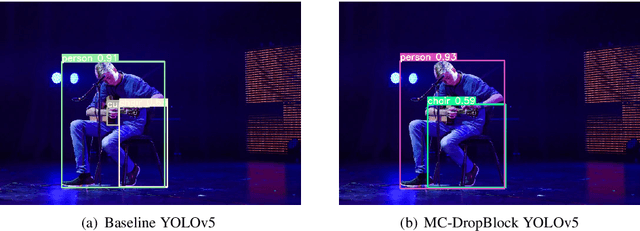
With the advancements made in deep learning, computer vision problems like object detection and segmentation have seen a great improvement in performance. However, in many real-world applications such as autonomous driving vehicles, the risk associated with incorrect predictions of objects is very high. Standard deep learning models for object detection such as YOLO models are often overconfident in their predictions and do not take into account the uncertainty in predictions on out-of-distribution data. In this work, we propose an efficient and effective approach to model uncertainty in object detection and segmentation tasks using Monte-Carlo DropBlock (MC-DropBlock) based inference. The proposed approach applies drop-block during training time and test time on the convolutional layer of the deep learning models such as YOLO. We show that this leads to a Bayesian convolutional neural network capable of capturing the epistemic uncertainty in the model. Additionally, we capture the aleatoric uncertainty using a Gaussian likelihood. We demonstrate the effectiveness of the proposed approach on modeling uncertainty in object detection and segmentation tasks using out-of-distribution experiments. Experimental results show that MC-DropBlock improves the generalization, calibration, and uncertainty modeling capabilities of YOLO models in object detection and segmentation.