 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManaging Industrial Communication Delays with Software-Defined Networking
Apr 14, 2020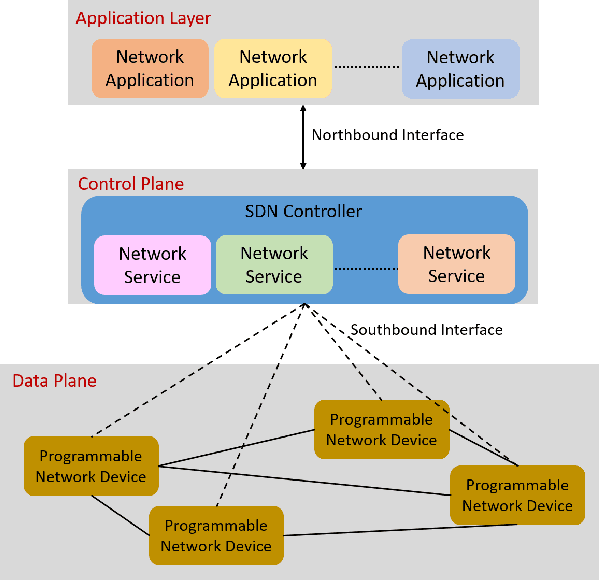
Recent technological advances have fostered the development of complex industrial cyber-physical systems which demand real-time communication with delay guarantees. The consequences of delay requirement violation in such systems may become increasingly severe. In this paper, we propose a contract-based fault-resilient methodology which aims at managing the communication delays of real-time flows in industries. With this objective, we present a light-weight mechanism to estimate end-to-end delay in the network in which the clocks of the switches are not synchronized. The mechanism aims at providing high level of accuracy with lower communication overhead. We then propose a contract-based framework using software-defined networking where the components are associated with delay contracts and a resilience manager. The proposed resilience management framework contains: (1) contracts which state guarantees about components behaviors, (2) observers which are responsible to detect contract failure (fault), (3) monitors to detect events such as run-time changes in the delay requirements and link failure, (4) control logic to take suitable decisions based on the type of the fault, (5) resilience manager to decide response strategies containing the best course of action as per the control logic decision. Finally, we present a delay-aware path finding algorithm which is used to route/reroute the real-time flows to provide resiliency in the case of faults and, to adapt to the changes in the network state. Performance of the proposed framework is evaluated with the Ryu SDN controller and Mininet network emulator.
Real-time QoS Routing Scheme in SDN-based Robotic Cyber-Physical Systems
Apr 09, 2020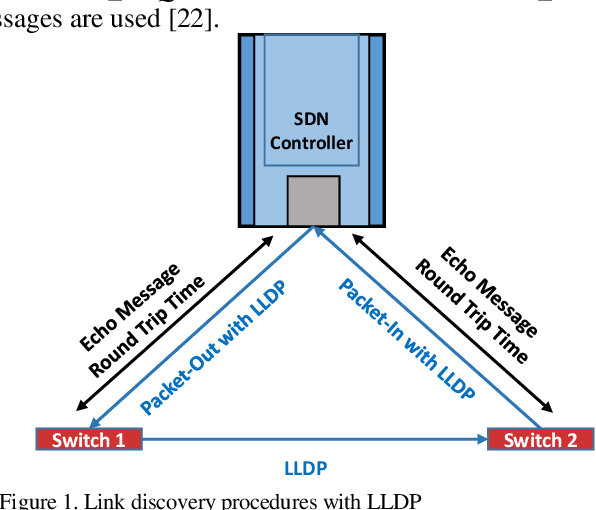

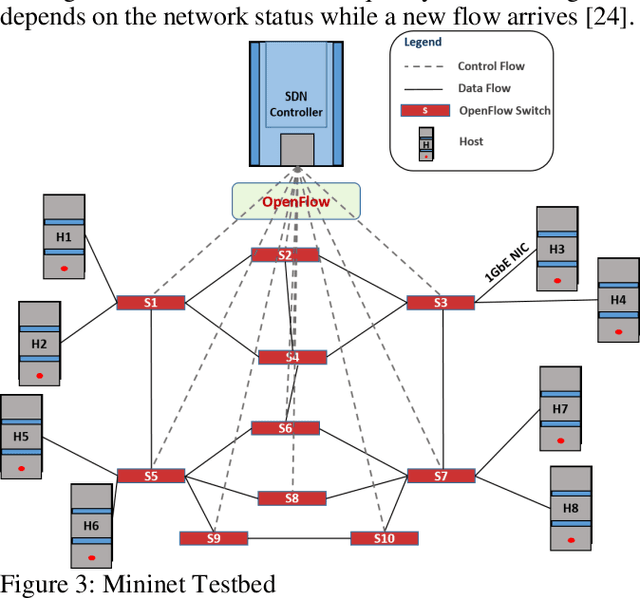
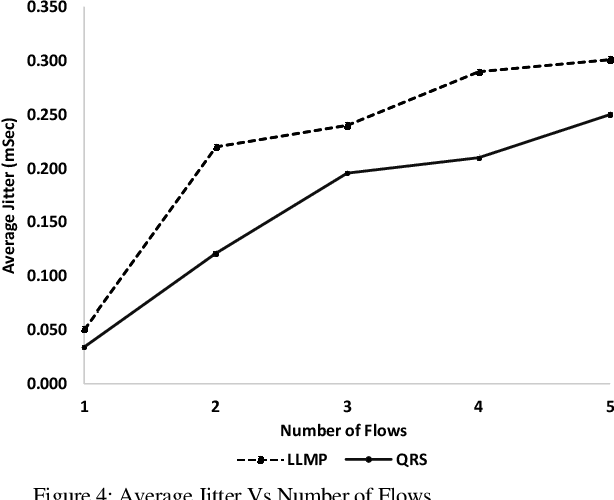
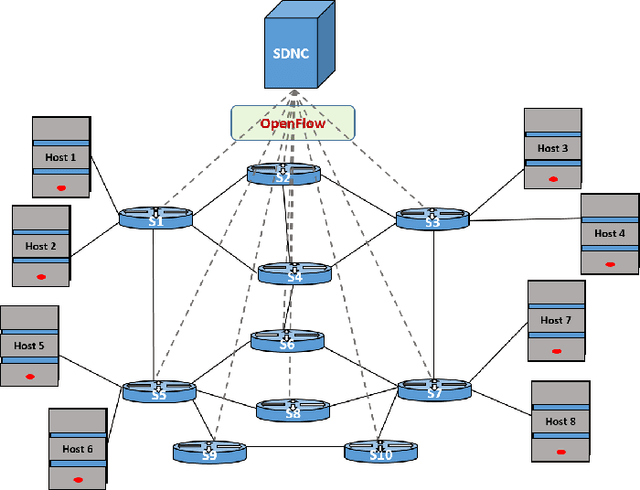
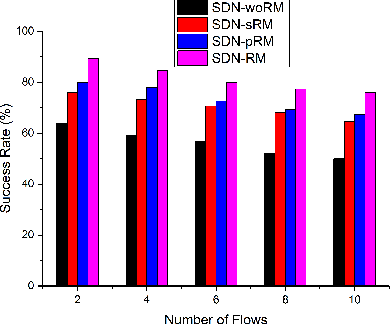
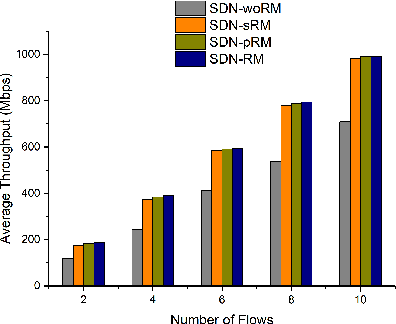
Industrial cyber-physical systems (CPS) have gained enormous attention of manufacturers in recent years due to their automation and cost reduction capabilities in the fourth industrial revolution (Industry 4.0). Such an industrial network of connected cyber and physical components may consist of highly expensive components such as robots. In order to provide efficient communication in such a network, it is imperative to improve the Quality-of-Service (QoS). Software Defined Networking (SDN) has become a key technology in realizing QoS concepts in a dynamic fashion by allowing a centralized controller to program each flow with a unified interface. However, state-of-the-art solutions do not effectively use the centralized visibility of SDN to fulfill QoS requirements of such industrial networks. In this paper, we propose an SDN-based routing mechanism which attempts to improve QoS in robotic cyber-physical systems which have hard real-time requirements. We exploit the SDN capabilities to dynamically select paths based on current link parameters in order to improve the QoS in such delay-constrained networks. We verify the efficiency of the proposed approach on a realistic industrial OpenFlow topology. Our experiments reveal that the proposed approach significantly outperforms an existing delay-based routing mechanism in terms of average throughput, end-to-end delay and jitter. The proposed solution would prove to be significant for the industrial applications in robotic cyber-physical systems.